分布式通信与并行策略
1.通信方式(NVIDIA NCCL标准)
1.1 Broadcast

1.2 AllGather
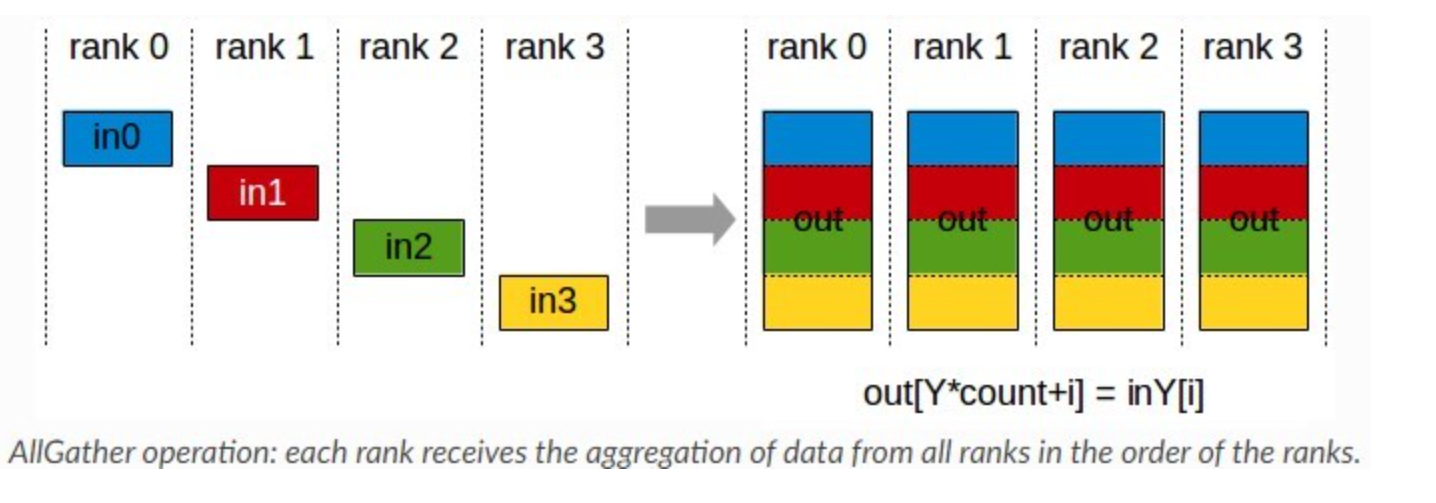
这里是使用的ring方法,即每个卡在每个时间段接收上一张卡的数据并发送当前卡的数据,每次发送第(k-1)步接收到的数据,如果k=1,即发送自己卡上的数据,经过N-1步(N为rank数),每张卡均可得到全量的信息。
1.3 ReduceScatter
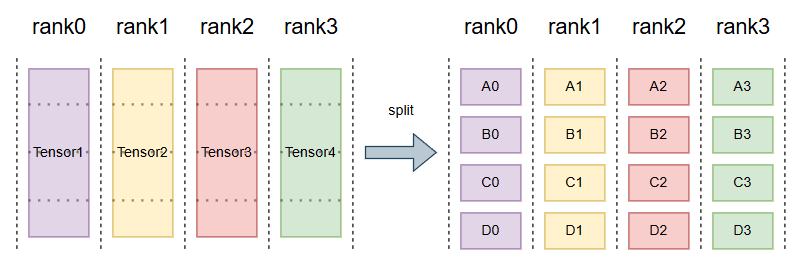
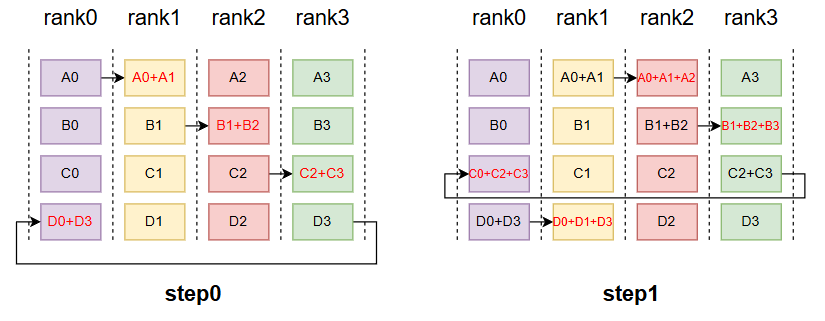
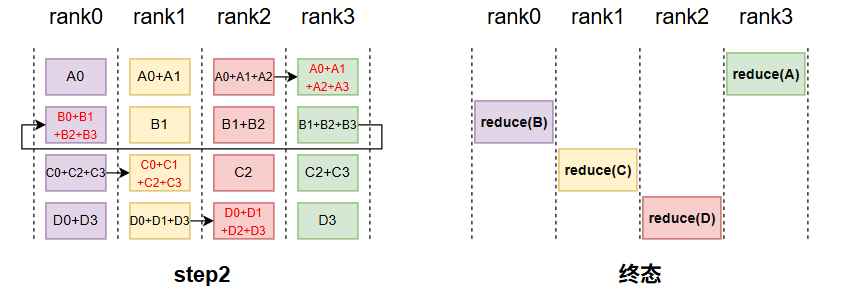
目前比较常用的就是一个ring结构;reduceScater遵循以下规则,假设有n 个rank,首先会将每个rank上的tensor,切分成个块,紧接着将其按照如下规则,每一个时间步,都按以下规则发送和接收块tensor,并且接收的块做reduce,最终rank_i得到了第(rank_i+1)%num_ranks的结果。
规则:
第 k 步 (k 从 0 到 N-2, 这里 N=4):
- 发送:将本地缓冲区的第
(rank - k) % N块发送给下一个邻居(rank+1)。 - 接收:从上一个邻居(
rank-1)接收一个数据块,并把这个数据块与本地缓冲区的第(rank - k - 1) % N块相加(Reduce)。
1.4 Reduce
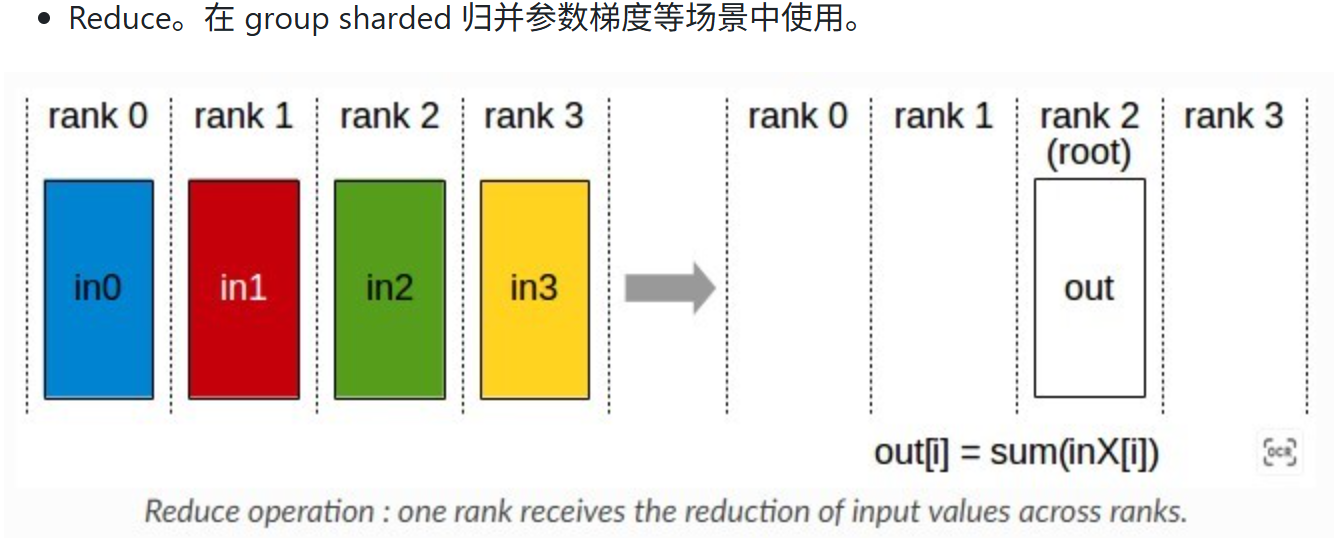
reduce的ring实现方法是reduce_scatter+p2p,即先进行reduce_scatter每张卡保留部分数据,然后直接进行p2p通信,都把自己卡上的数据发送给root。
1.5 AllReduce
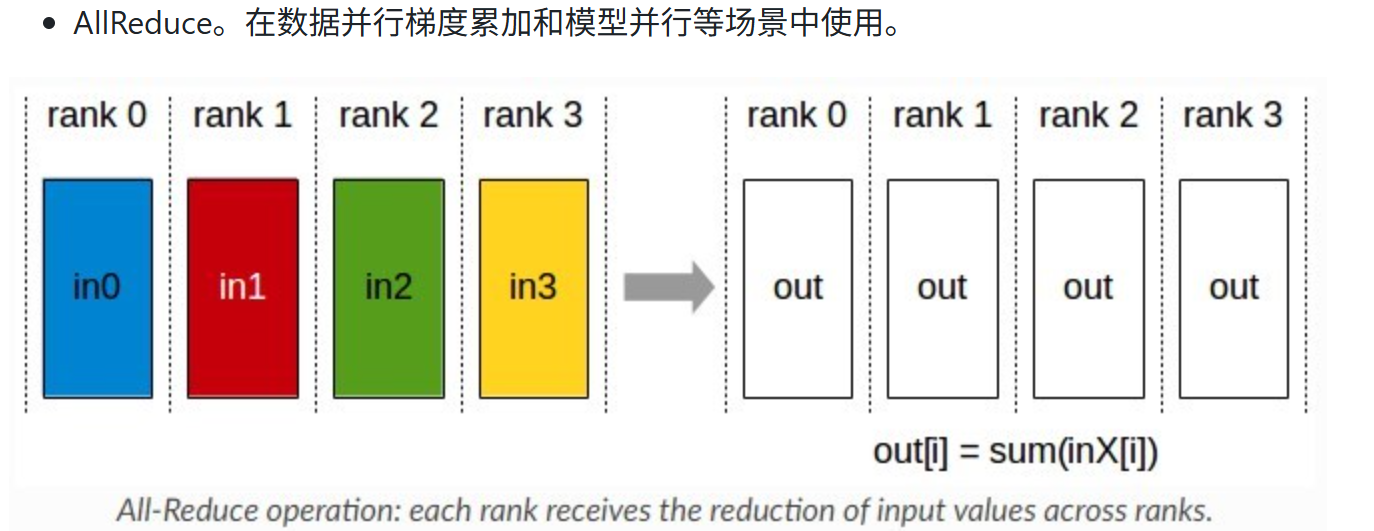
Allreduce的底层一般分为两种实现,一种是ring,一种是tree,当然还有蝶形的,因为前面两者用的比较多,所以主要了解的是前两个。
首先环状结构的实现其实就是reduce_scatter+allgather的组合,先进行(n-1)步的reduce_scatter,每个rank发送(rank-k)%N块的数据给相邻的下一个rank,k表示步数,并且从上一个rank接收数据,并将此数据加在(rank-k-1)%N块数据上,也就是做reduce,最终每个rank都有完整out的部分块,并且合并起来就是完整的out,此时再做一个allgather即可让每个rank都得到完整out,总步数为2(n-1)。特点:带宽利用率高,每一时刻所有rank都在收发数据,但延迟较高。
其次是树状结构的实现,这个主要是解决Ring在大规模节点下延迟过高的问题,适合节点极多或中小数量的场景。它将节点组织成二叉树,叶子节点把数据发送给父节点,直到根节点,即可拿到全局数据,然后使用Broadcast(向下广播),把总和发送给子节点。特点:带宽利用率低,且越接近根节点,通信压力越大,但延迟低,为2log2(N)。
当tensor小,节点数多,延迟高时,用tree,反之用ring。一般GPU用NV Link通信,都是用ring比较多。
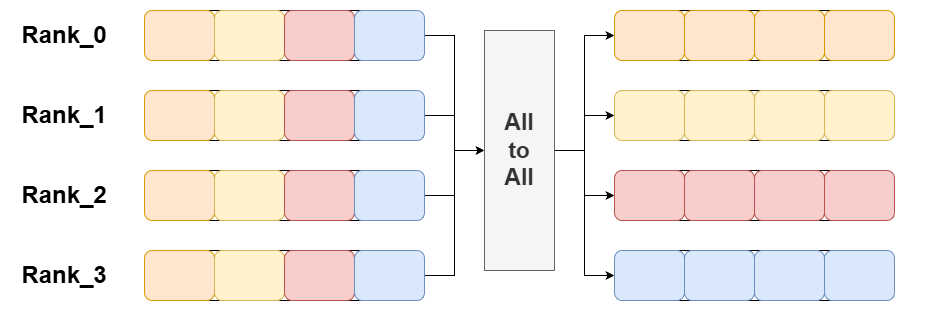
1.6 All-To-All
All-To-All 将每个参与进程将其数据分割成 N 份(N 是参与进程的总数),并将第 i 份发送给第 i 个进程。每个进程都会向其他所有进程发送数据,并从其他所有进程接收数据。如下图,All-to-All的底层实�现是用P2P实现,即点对点通信:
1.7 总结
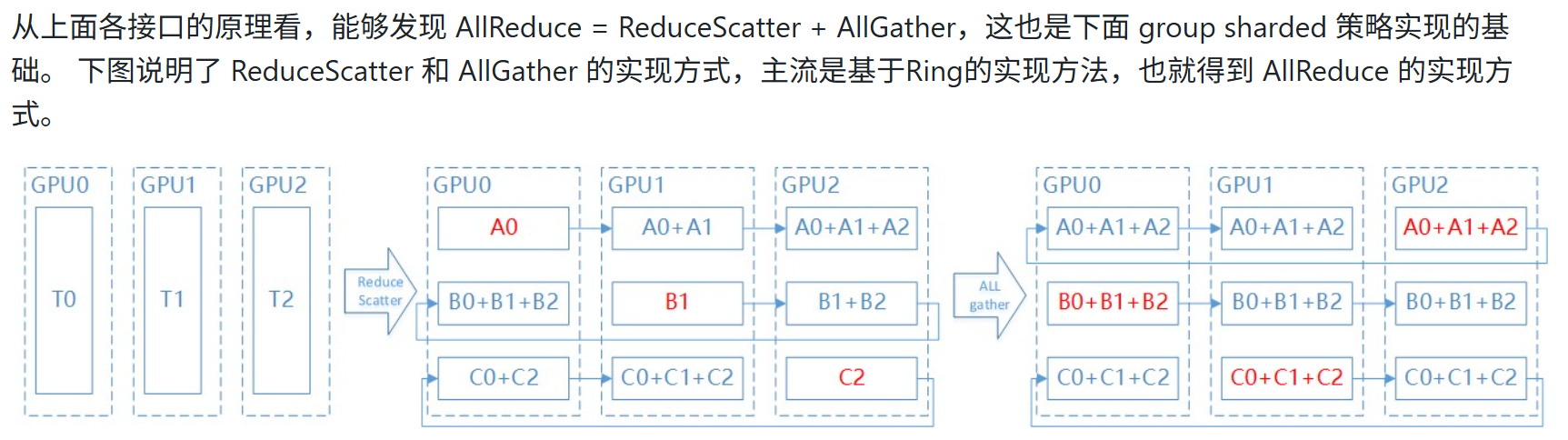
这里怎么理解AllReduce = ReduceScatter + AllGather,主要是因为ReduceScatter 把每张卡的值汇总起来,做reduce(可能是sum,average等),然后把结果分成rank个sub_result部分,分别给每个rank,而AllGather再把这rank个sub_result给聚合起来到每个rank上,则每个rank都有完整的result。其机制就跟直接做allreduce一样,对每个rank的数据汇总做reduce,然后把result分到每个rank上。
reduce_scatter使得每个rank_i获得了第(rank_i+1)%num_ranks的结果。这是需要n-1步,然后all gather需要把每张卡上reduce的结果,分发到其它卡,再走n-1步,所以一共的通信步是2*(n-1)。
2. Paddle三类通信区分动手,动半,静态全自动

同时,在动手的案例中不会出现dist_tensor,shard这些东西,因为这是动半特有的,对通信进行标记使用shard,而tensor被shard处理后,即变成了dist_tensor。
3.分布式并行方式
分布式并行方式包括:数据并行(DP),张量并行(tp),流水并行(pp),专家并行(ep),序列并行(sp),上下文并行(Context Parallel)
3.1 数据并行。
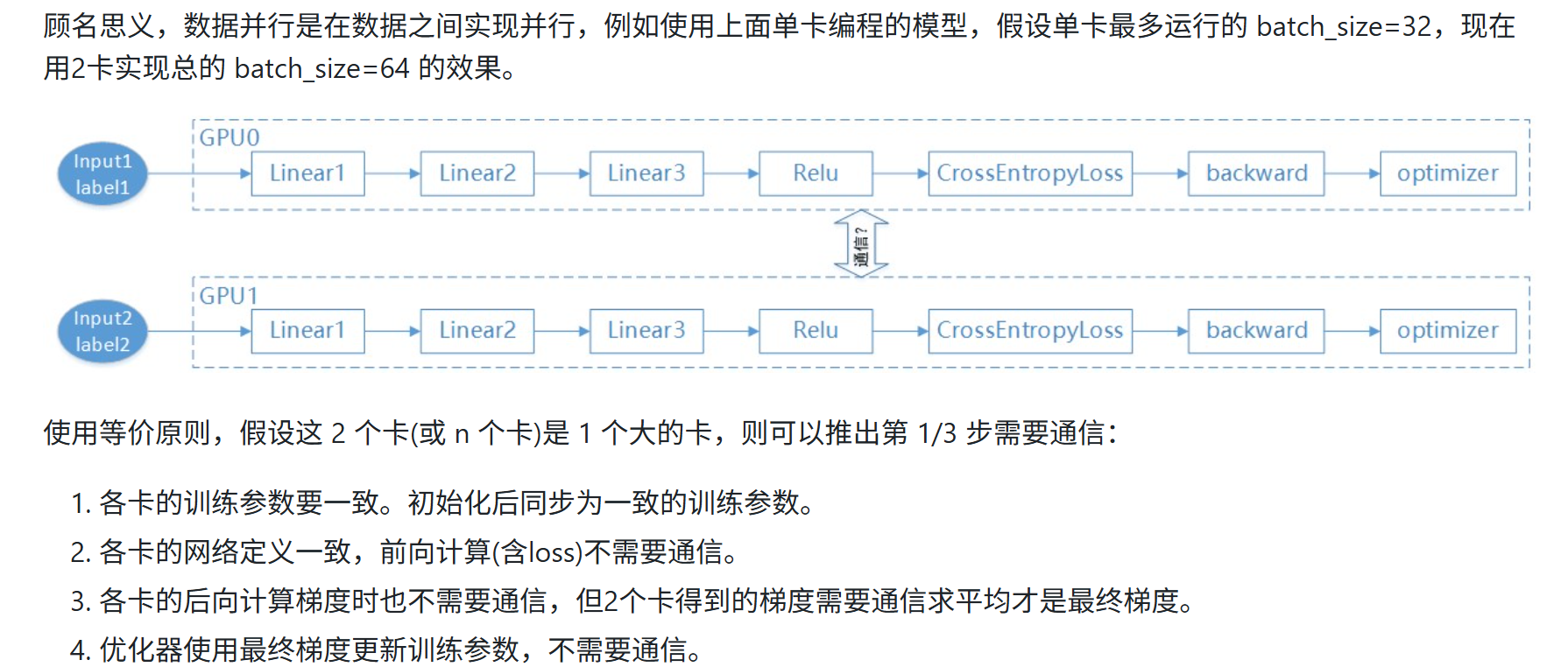
1通信为了让数据并行模型参数保持一致,3通信是为了让梯度累加;在反向过程中,本层的∇x梯度计算完毕后,可以继续计算下一层的∇x梯度,而不需要等待∇w的梯度计算,做∇x梯度的计算时,又可以做∇w的allreduce通信,从而达到通信与计算重叠。
必须注意,∇x不需要做allreduce,只有∇w需要,因为∇w做allreduce是为了同步每一份相同参数的grad,最后更新后的参数也在DP组间保持一致,而∇x两张卡上是分别不同的batch数据计算得来的,没有数学依赖关系。
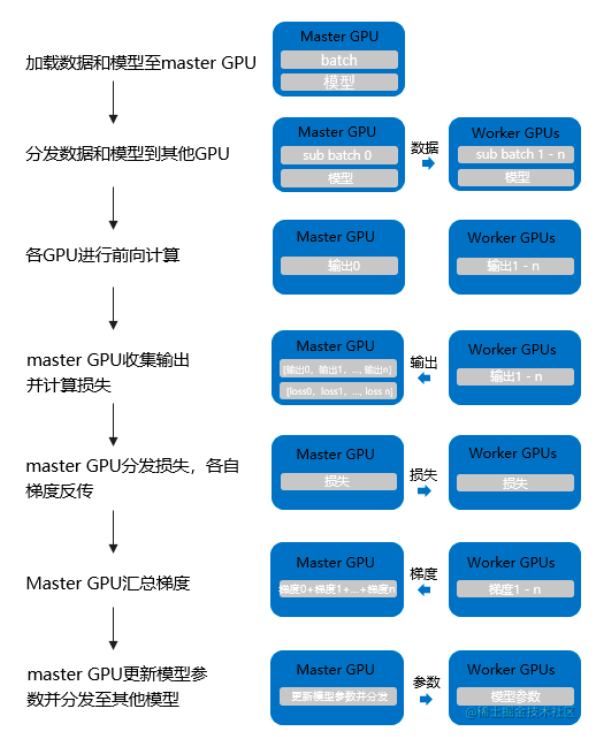
注意: 数据并行分两种,上面是DDP,即Distribute_DP是基于多进程实现的,还有一种是DP,是单进程多线程实现,如下图所示,它使用一个进程来计算模型权��重。
注意: 二者效果是等价的,因为假设我们DP实现batchsize为64的数据量,对于DP来说,它会在计算loss时,汇总64条数据的output,然后和lable计算出loss,并得到一个平均的loss,再传给各GPU进行反向传播,此时每个grad就是平均之后的,即除以了64的。而DDP 则分给两个GPU各自去计算梯度,每个GPU计算的梯度也是mean的,不过是除以32的,所以要再allreduce一下,两个相加除以2,即同样是除以64。
补充说明:ZeRo(DeepSpeed,微软提出) 以及FSDP(Pytorch最新数据并行方案,ZeRo3和FSDP思想等价)
Group Sharded:
(这里存在一个组shard的概念,即按param的属性,将其划分到一个group,这些param在group里面同步和通信,与其它group相对独立,可以看一下记录的Dynamic optimizer shardingV1,V2的Fused_Buffer的概念)
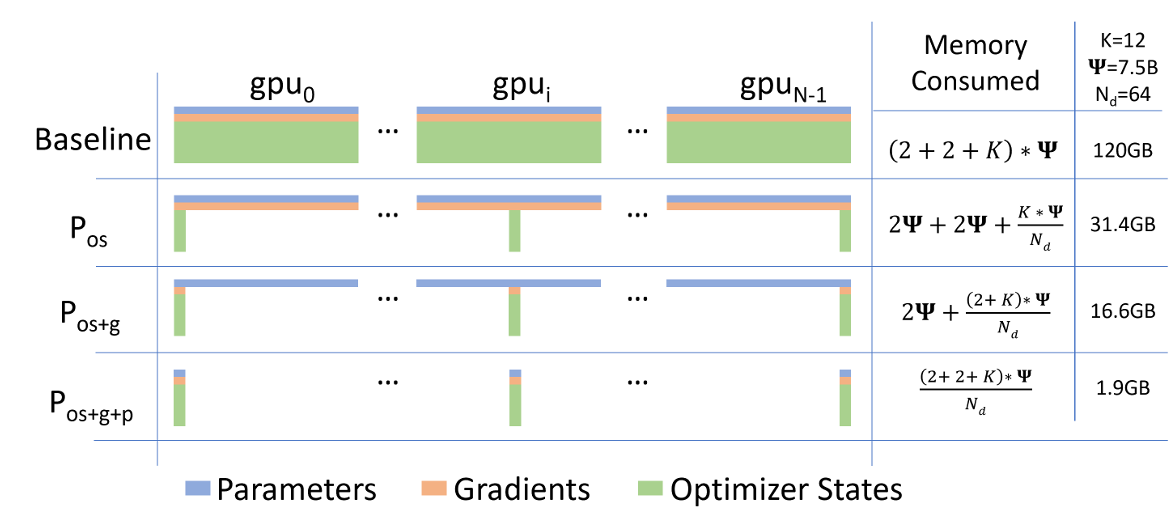
ZeRO-1(pytorch:OSS):
ZeRO-1没有将模型本身进行分片,也没有将Gradient进行分片,而是只将优化器进行分片。训练过程与DDP类似。
- forward过程由每个rank的GPU独自完整的完成,然后进行backward过程。在backward过程中,梯度通过allReduce进行同步。
- Optimizer state 使用贪心策略基于参数量进行分片,以此确保每个rank几乎拥有相同大小的优化器内存。
- 每个rank只负责更新当前优化器分片的部分,由于每个rank只有分片的优化器state,所以当前rank忽略其余的state。
- 在更新过后,通过广播或者allGather的方式确保所有的rank都收到最新更新过后的模型参数。
ZeRO-1 非常适合使用类似Adam进行优化的模型训练,因为Adam拥有额外的参数m(momentum)与v(variance),特别是FP16混合精度训练。ZeRO-1 不适合使用SGD类似的优化器进行模型训练,因为SGD只有较少的参数内存,并且由于需要更新模型参数,导致额外的通讯成本。ZeRO-1只是解决了Optimizer state的冗余。
ZeRO-2(pytorch:SDP):
相比于ZeRO-1,ZeRO-2除了对optimizer state进行切分,还对Gradient进行了切分。
像ZeRO-1一样将optimizer的参数进行分片,并安排在不同的rank上。在backward过程中,gradients被reduce操作到对应的rank上,取代了all-reduce,以此减少了通讯开销。 每个rank独自更新各自负责的参数。在更新操作之后,广播或allGather保证所有的ranks接收到更新后的参数。
ZeRO-3(pytorch:FSDP):
为了进一步节省更多的内存,ZeRO-3提出进行模型参数的分片。类似以上两种分片方式,ranks负责模型参数的切片。可以进行参数切片的原因主要有以下两点:
- All-Reduce操作可以被拆分为Reduce与allgather操作的结合。
- 模型的每一层拥有该层的完整参数,并且整个层能够直接被一个GPU装下。所以计算前向的时候,除了当前rank需要的层之外,其余的层的参数可以抛弃。从这个层面上来说,Zero相当于数据并行+模型并行。
FSDP(Fully Sharded Data Parallel):
FSDP 是一种新型数据并行训练方法,但与传统的数据并行不同,传统的数据并行维护模型参数、梯度和优化器状态的每个 GPU 副本,而 FSDP 将所有这些状态跨数据并行工作线程进行分片,并且可以选择将模型参数分片卸载到 CPU。
下图显示了 FSDP 如何在 2 个数据并行进程中工作流程:
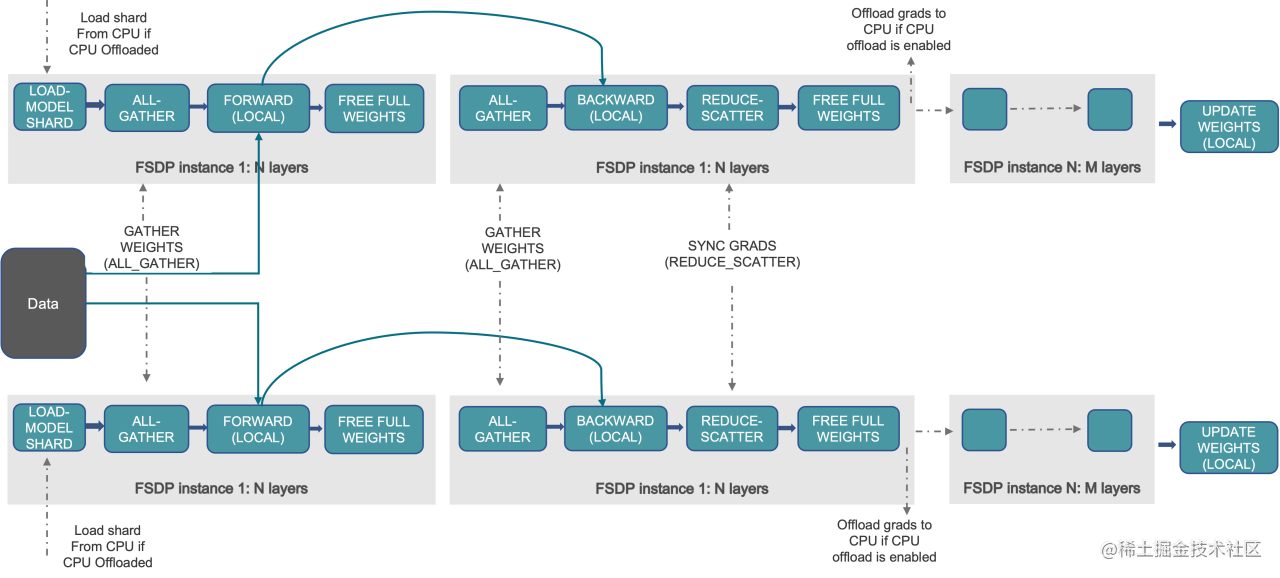
通常,模型层以嵌套方式用 FSDP 包装,因此,只有单个 FSDP 实例中的层需要在前向或后向计算期间将完整参数收集到单个设备。 计算完成后,收集到的完整参数将立即释放,释放的内存可用于下一层的计算。 通过这种方式,可以节省峰值 GPU 内存,从而可以扩展训练以使用更大的模型大小或更大的批量大小。 为了进一步最大化内存效率,当实例在计算中不活动时,FSDP 可以将参数、梯度和优化器状态卸载到 CPU。
3.2 张量并行(TP,MP)
1 基础并行层
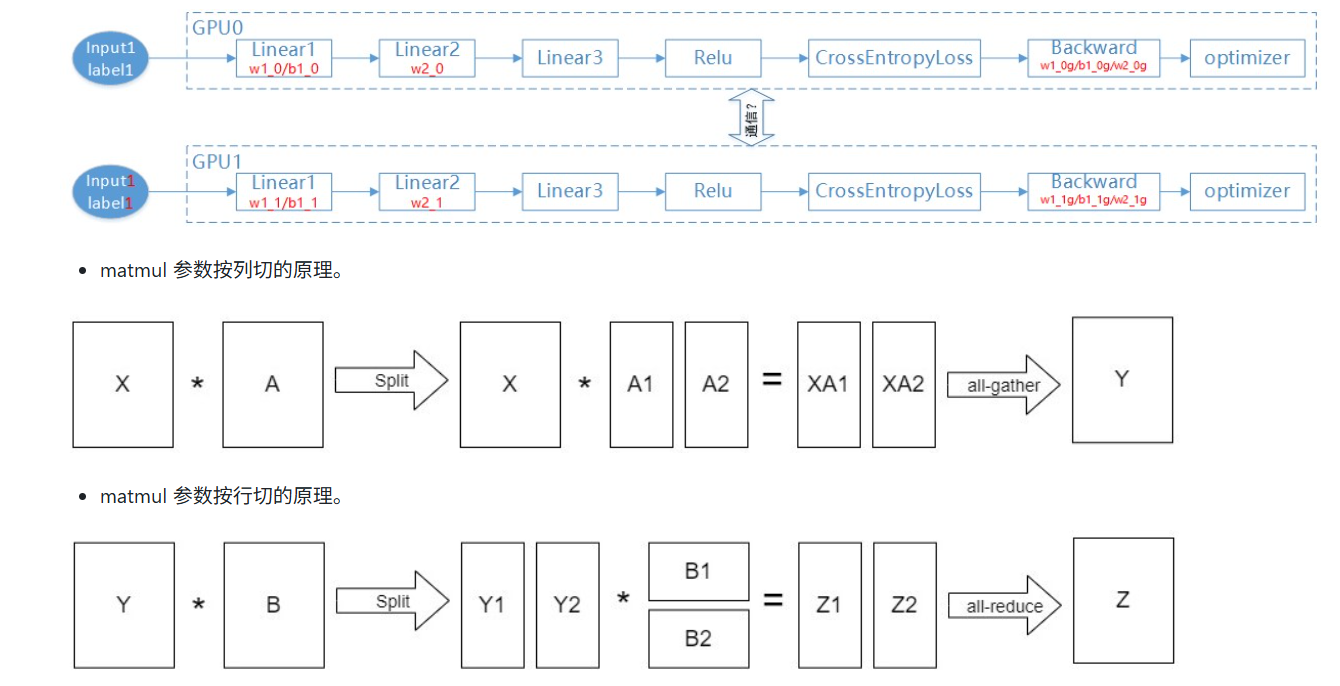
1.1 ColumnParallelLayer与RowParallelLayer同时使用的关系
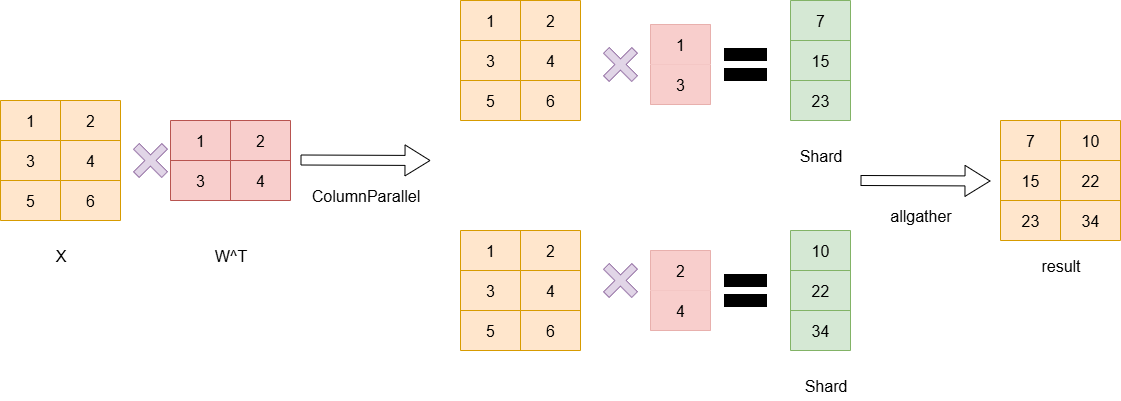
ColumnParallelLayer
RowParallelLayer
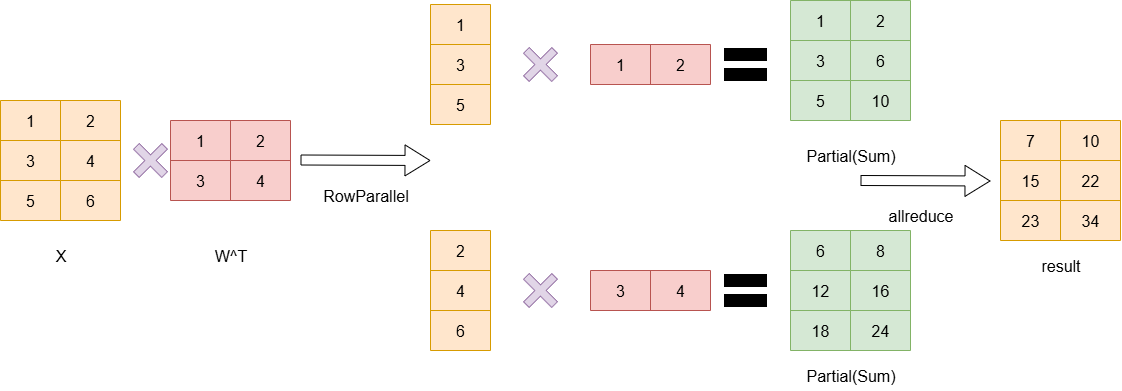
可以看到,RowParallelLayer在计算的过程中,需要把输入拆分成两列分别在两张卡上做计算,最终两张卡都得到Parital状态的数据,而如果上一层是ColumnParallel则其计算的结果刚好分配到两个设备上(即结果被按列切分),而此结果正是RowParallelLayer需要的输入,那么就无需做通信,直接继续计算最后再做allreduce即可。
1.2 ColumnParallelLayer与RowParallelLayer的w和bias的切分

注意,在做y=x*W^T+b的计算时,首先乘积得到的数据是[batchsize,output_size],每一行表示一个数据,而bias是分别和每一行相加,因此bias是一个一维的向量,因此,当W按列切分时,bias需要按行切分,从而保持正确的计算关系。
当添加了bias的时候,做RowParallelLayer和ColumnParallelLayer情况如下:
RowParallelLayer:
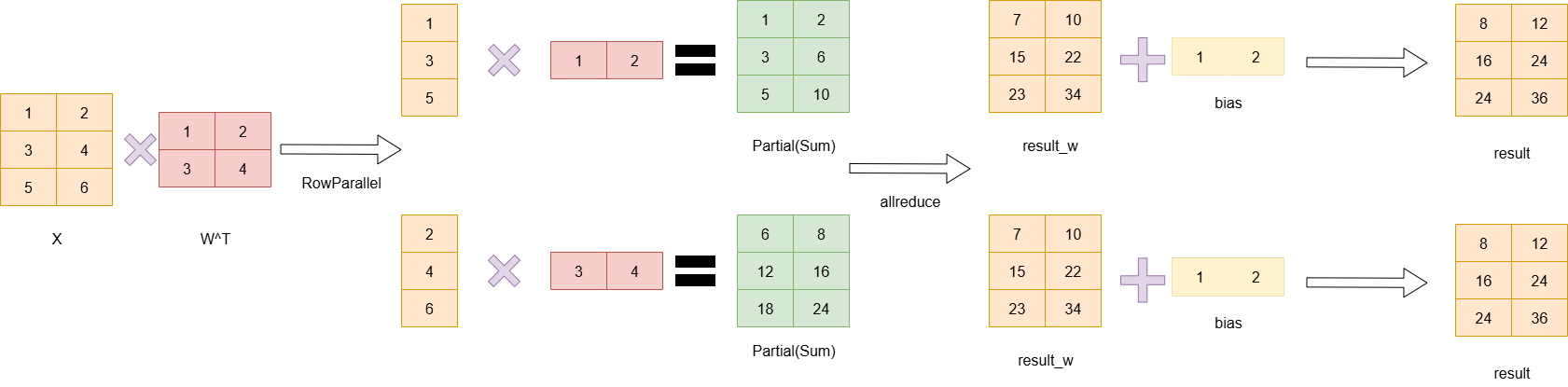
RowParallelLayer只切w,不切bias
ColumnParallelLayer:
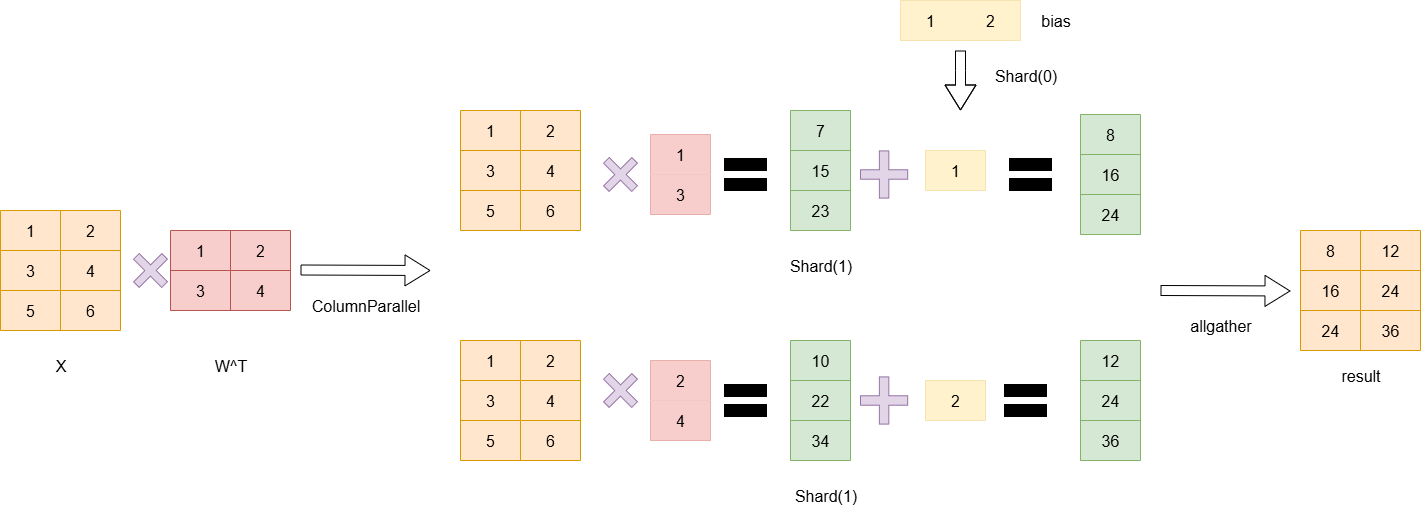
ColumnParallelLayer切w的axis=1,切bias的axis=0
1.3 Vocab Parallel Embedding
Vocab Embedding
示例:
文本输入
用户输入: "Hello world, how are you?"
分词(Tokenization)
分词结果: ["Hello", "world", ",", "how", "are", "you", "?"]
词汇表映射(Vocabulary Mapping)
词汇表: {"<PAD>": 0, "<UNK>": 1, "<BOS>": 2, "<EOS>": 3,
"Hello": 4, "world": 5, ",": 6, "how": 7, "are": 8, "you": 9, "?": 10, ...}
映射结果: [4, 5, 6, 7, 8, 9, 10]
输入到模型为词汇ID序列
模型接收的输入: x = [4, 5, 6, 7, 8, 9, 10] (词汇ID序列)
因此,Vocab Embedding接收到的输入x是[batch_size,seq_length],即多组词汇ID序列。Vocab Embedding的大小为(vocab_size,hidden_dim),vocab_size这个维度即表示了所有token的ID,根据token_id找到对应的行,该行所有的列则表示当前这个token的向量化表示,即包含其数学维度信息的特征向量。初始时,这些数据是没有意义的,经过训练后,则可以表示每个词的空间特征,越相近的词,在空间上离得越近。
根据 x,在vocab表中查找对应token的向量化表示,最终输出为[batch_size,sequence_lenth,hidden_dim]。
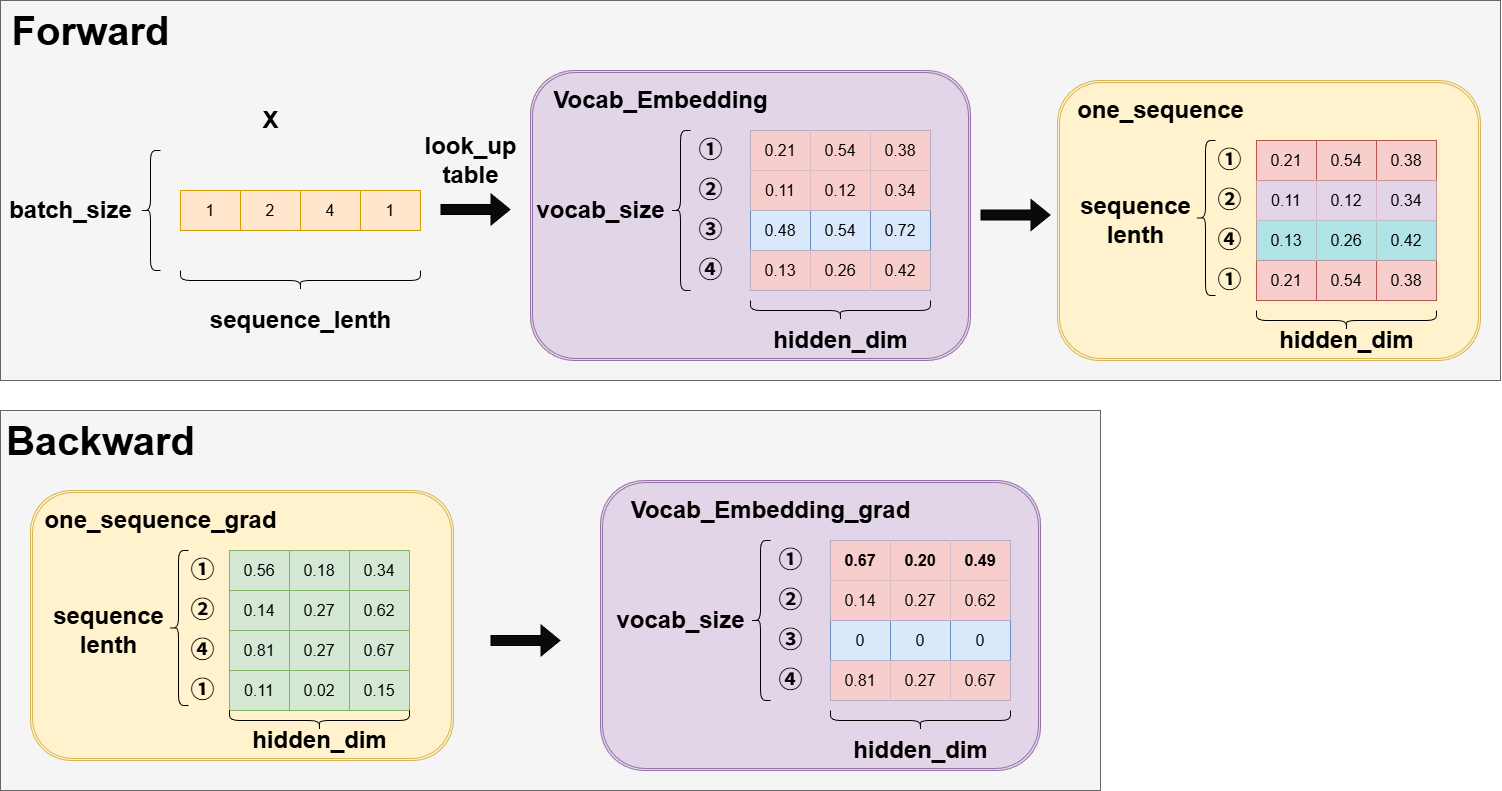
如图,以batch_size=1为例,查表后,通过当前输入的sequence_lenth中存在的token_ids,选择k行,最终构成[batch_size,sequence_lenth,hidden_dim]的输出。
反向的grad形状与forward输出时形状相同,而因为Vocab_Embedding的操作是从整个词表中选出k行数据,因此最后更新grad的时候,也是指有这k行数据有grad,而其它行均默认为0,若有相同token_id,则做梯度累加。
Vocab Parallel Embedding
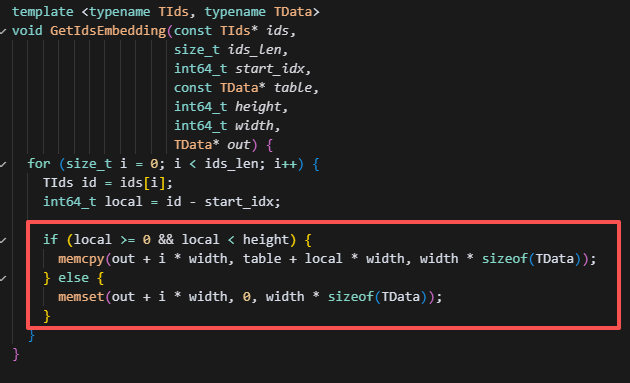
如果是词表并行,则按vocab_size维度做切分,多路并行时,在forward阶段需要做all_reduce,因为只在本rank的词表查找,若查找到,则返回词表的这一行值,即当前token的向量化表示;若超过此范围,则返回的是默认值0。all_reduce之后,每个rank都能拿到全部token的向量化表示。反向梯度更新的时候无需通信,直接选当前rank的词表范围内的梯度进行累积,并更新词表对应行的数据即可。
一般来说,输入层和输出层共用一个word embedding,所以在backward过程,我们会分别对输入,输出层做一次梯度计算,而最终更新embedding的时候应该是两次梯度的总和,所以如果是TP没什么问题,因为TP下,输入和输出层都在一个GPU上,而当PP时,会分在不同卡上,这时候就需要对两卡的word embedding 梯度做一次all reduce。
1.4 输出层的 Vocab Embedding
输出层的vocab embedding和输入层的操作刚好相反,输入层是将对应的token_id的embedding数据取出,即将seq_len扩展成,而输出层的vocab embedding则是将embedding映射回词表,即变成。推理的话只需要取seq_len的最后一行的数据,做softmax即可。具体计算如下:
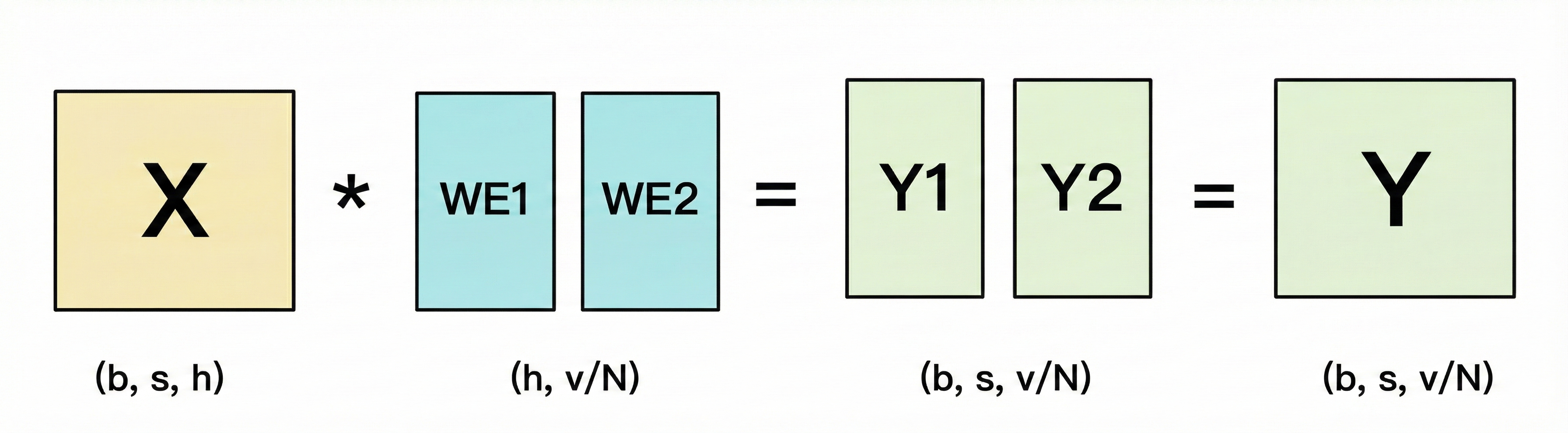
可以发现,这时候得到的Y1,Y2是Y被列切的状态,我们可以用all_gather去让每个rank得到完整的Y,但是这样做的单卡通信量是,所以为了减少计算量,Megatron并不用allgather做实现,而是用allreduce,如下方法:
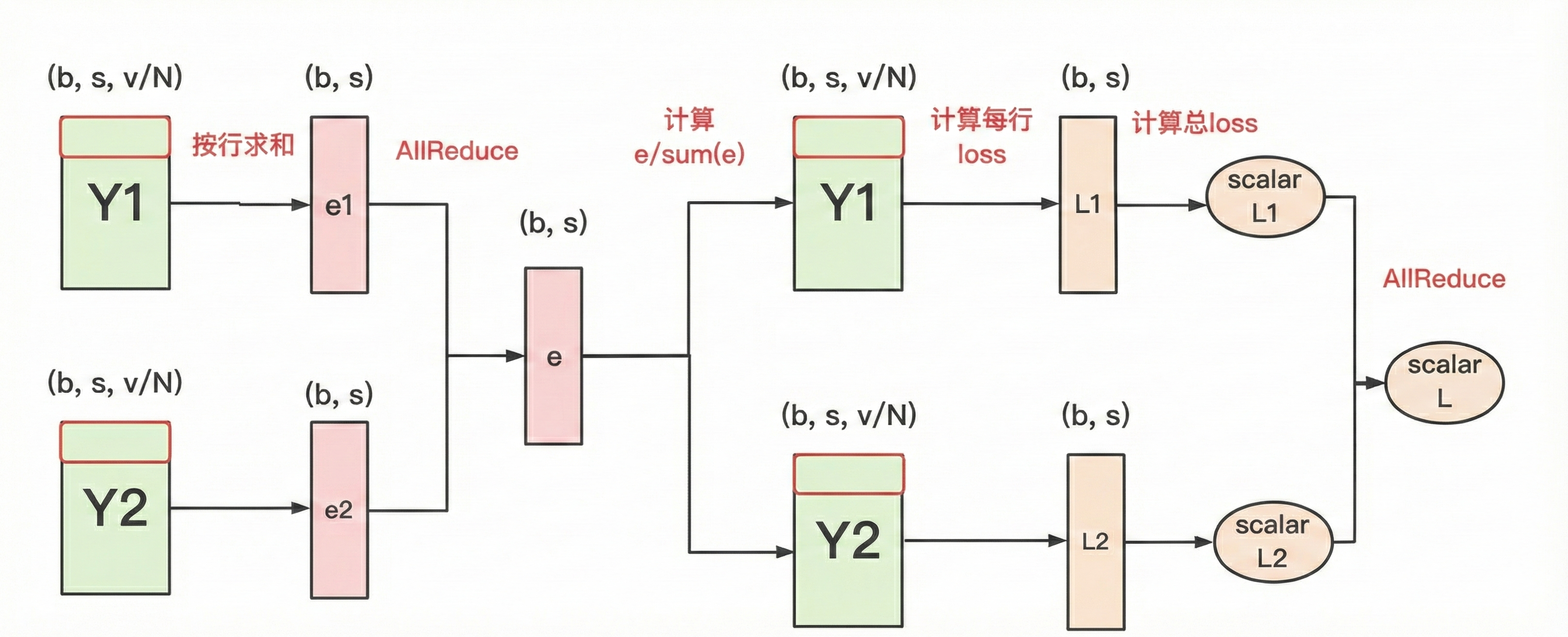
将每个rank上的输出Yi按行求和,此时得到的是局部和,再做一个allreduce,则得到全局和,有了全局和,就可以做softmax计算每个Yi每一行logits的概率,并按行计算loss,这里计算loss,比如当前预测的token前[1,v/2],而在rank2上就会发现找不到这部分的概率,即这一行预测值和真实标签计算Cross Entropy的时候会出现全0,但是这一半在rank0上算了,而Cross Entropy本身也就只有一个位置是有值的(其它标签都为0,相当于没值)所以做一个allreduce即可得到最终的全局loss。
那么就可以发现,此时的单卡通信量就是,�一条数据一个loss,所以loss的通信量是b。
2.TP的forward与backward过程
通信分析(行列切的详细分析可以见基础并行层):
1.初始化:
各卡训练参数为partial状态,即部分参数,对于切分的参数,分别初始化;对于没有切分的参数,初始化后同步为一致的参数(此时需要通信同步)。
2.Forward
各卡的网络使用切分后的网络,即网络层数不变,但shape为切分后的shape。如果是column parallel,则得到的每个rank的output也是经过了column parallel的output,因此需要做allgather,将输出拼接;而如果是row paralle,则得到的每个rank的output,形状与output相同,但数据属于partial状态,需要做all-reduce获得完整张量。
看上图,假设Linear1是ColumnParallel,Linear2是RowParallel,则列切计算出来后的结果,可以直接作为行切的输入(如果tp数相同,即Y1,Y2),因此无需通信(注意,若此时下一层做全参数计算,而不是RowParallel,则需要做all-gather聚合输出,拼接成完整的输出Y),而Linear2的结果要作为完整参数输入到Linear3(和单卡视角对齐),因此需要对Z1,Z2做allreduce,得到完整输入Z。这里需要做一次通信。
3.Backward
在反向传播过程中,因为Linear3以后的层�都是完整参数,所以纯TP下,反向计算的梯度都是一样的,无需通信,
Linear2的反向梯度计算:
完整参数下:
而由于卡1和卡2分别占据部分参数B1、B2,因此只需要B1、B2部分参数分别对应的梯度即可(Y1,Y2分别是卡1,卡2此时的输入,因此分��别计算自己卡上的数据,无需通信):
即
同理,B2的梯度也是,所以求B1的梯度无需通信。
对于输入Y,由于对称性,可知:
Y2同理,此时计算出来的梯度无需通信,因为Y1,Y2即分别对应rank0,rank1的上一层Linear1的输出,上一层也是切分状态,所以,求输入的梯度Y1,Y2也无需通信。注意:若上一层为完成的参数做forward,即rank0,rank1输入都是完整的Y,则backward时,需要做allgather将Y1_grad,Y2_grad做聚合
Linear1的反向梯度计算:
X*A1=Y1,X*A2=Y2
则
每个rank都有全量X,因此也无需通信。
但是,如果X需要继续传播梯度:
对于rank1:
对于rank2:
此时两个rank的是partial的状态,因此需要做allreduce,才能得到X的完整梯度。如果要继续往下传递grad,且接下来的参数都是未切分的,则这里需要做all-reduce通信合并成完整梯度。
4.Optimizer
每张卡获得grad后,在optimizer中进行参数更新,无需通信。
3.Megatron中TP的使用
通常MLP层是两个FFN,则都是列切和行切配对实现的,即TP层一般输入都用列切接收,并用行切处理后,再输出结果。即TP处理后的模型层,最终输出是一个partial的状态,需要做all-reduce来累加得到全局结果,但是每个rank上的�形状都完全一样。MLP层切分的维度即model_dim
而对于Attention层来说,正好存在多头注意力机制,而每个头的self-attention计算是独立的,因此TP可以直接按照头的维度切分。
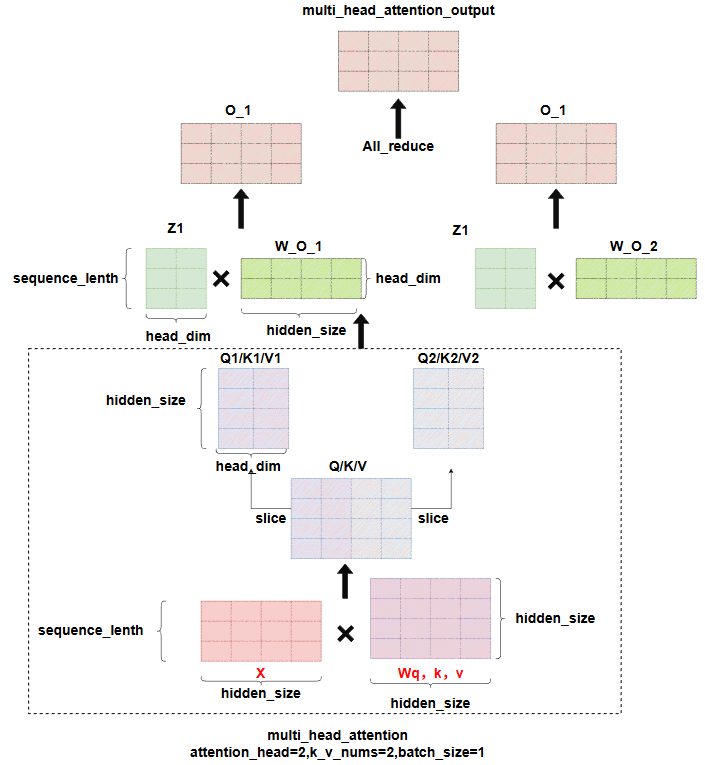
注意,一般multi-head-attention,在单卡计算时,是多个attention score(已经和V矩阵计算完)计算完成后,拼接成一个大的矩阵,再和输出的Wo矩阵做计算,得到最终的输出,但是在TP下,如果仍然按这个操作,会导致每张卡上都保留有一个完整的Wo矩阵的副本,浪费显存,因此megatron把Wo矩阵也按head的维度做了切分,则每个tp rank上算出来的输出O,均是一个partial的状态,经过一次all_reduce即可得到完整的输出,这就是为什么这里是all_reduce通信而不是allgather。
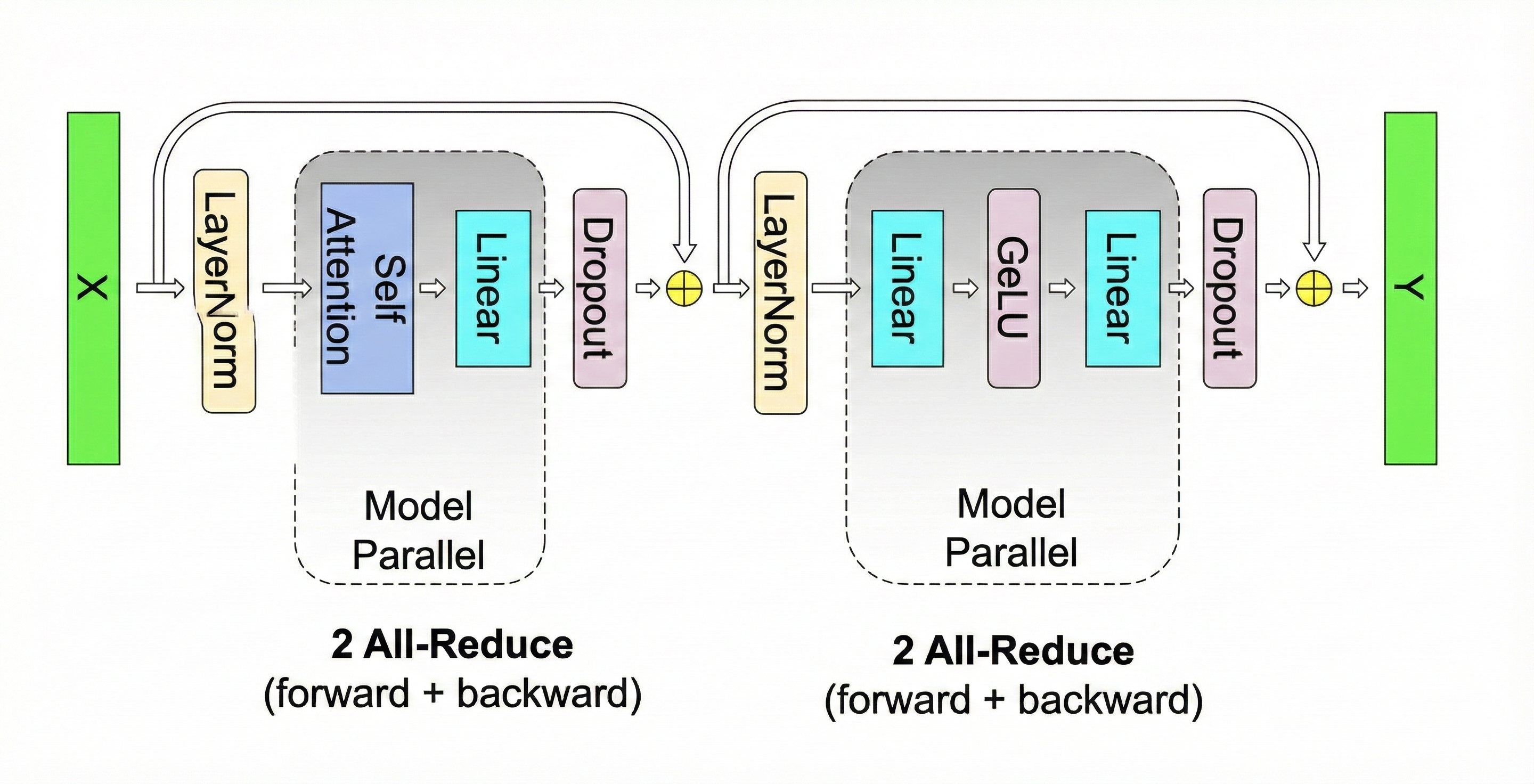
如图即为TP下一层Attention+一层MLP层的forward的过程。在整个前向+反向共4次all-reduce。
DP与TP混合时,由于DP每一层之间没有通信依赖,即当前层做allreduce时,可以继续算下一层的梯度,而对于TP来说,它计算完当前层的grad,需要卡间做allreduce后,得到全局的grad,才能继续下一层的梯度计算,因此DP和TP混合时,最好将TP放在同一台机器,DP可以看情况放在多条机器间,从而提高效率。
3.3 流水并行(PP)

流水并行是在模型层间实现并行,以层为粒度将不同的层和参数划分到不同卡上并行计算。如上图所示,将Linear1和Linear2切分到0号卡,Linear3和Relu切分到1号卡。流水并行钟,loss层和准确率计算都在前向计算的最后1卡上,也仅有这张卡上能获取到loss值。
同样进行通信分析:
1.各卡的训练参数按流水线切分后的参数分配,分别初始化,不需要通信。
2.各卡的网络使用切分后的网络,在前向计算中,当前卡计算完成后的数据要send到下一阶段的卡上,同时需要从其它卡通过recv接收数据。此时需要通信。
3.反向计算过程与前向一样,需要发送和接收grad数据,因此也需要通信。
4.由于optimizer不做切分,因此各卡都有完整优化器,用于更新参数,无需通信。
流水并行的基本示意图如下:
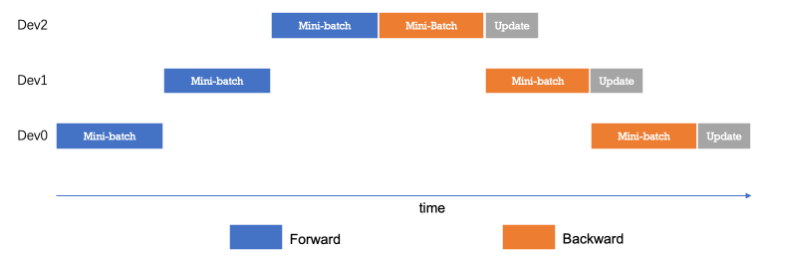
而为了优化流水线并行中设备的计算效率,可以进一步将mini-batch切分成粒度更小的micro-batch,来提升流水并行的并发度,进而达到提升设备利用率和计算效率的目的。如下是以更小粒度的micro-batch做编排:
FthenB

上图这样的方法是最基础的micro-batch方法。即先做forward,所有forward做完再做backward。假设forward和backward的时间分别是tf,tb,并且共有m个micro_batch,则理想的流水并行时间为:
但是注意,由于pp并行设备会经过warmup和cooldowm阶段,即存在设备空转的时期,因此导致并不是每时每刻所有设备都在处理micro_batch,所以实际时间还要加上空转的时间,其实就是bubble的时间。bubble占用时间:

并且FthenB存在大量activation数据被保存在显存等待backward的时候调用的问题,显存利用率很低。
1F1B编排

在此基础上,1F1B编排被提了出来,现在当第一个micro_batch做完所有的forward之后,就会立即开始做backward。
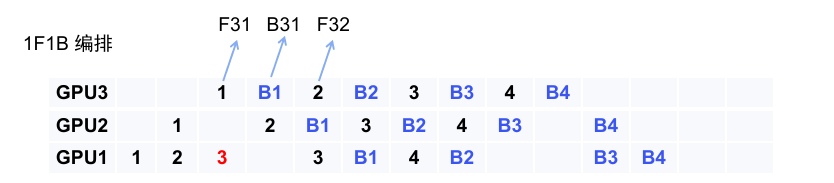
可以看到:
- gpu1的峰值动态内存最多只用保存3份forward的中间变量
- gpu3的峰值动态内存最多只用保存1份forward的中间变量
相比于之前的FthenB,如果现在用FthenB,则每张卡都要存4份,峰值显存相比之下降低了很多。
但是,需要注意的是,buble率并没有用下降,原因很简单,forward的时候,最后一个rank会空转直到第一个micro_batch的forward进行到最后一个模型块;而反向的时候第一个rank会空转直到第一个micro_batch的backward进行到第一个模型块,这在1F1B和FthenB中都是一样的结果。
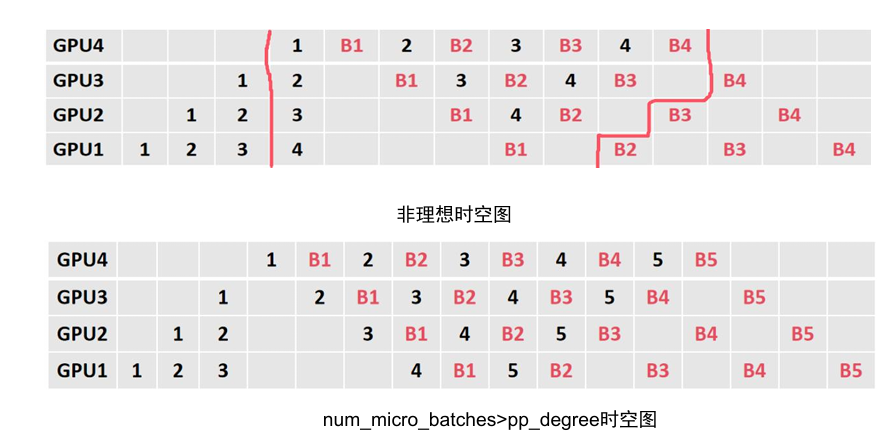

可以看到无论是非理想状态(即时空图不对称),还是forward,backward不相等,或者num_micro_batches>pp_degree,总体上1F1B都的编排都遵循如下规律,这里设forward为f,backward为b,流水并行数为数为N,流水并行编排阶段号为:
warmup阶段:
1F1B阶段:
cooldown阶段:
所以1F1B和FthenB的bubble占理想时间的比例均为:(p为pp_degree数)
![]()
激活重计算
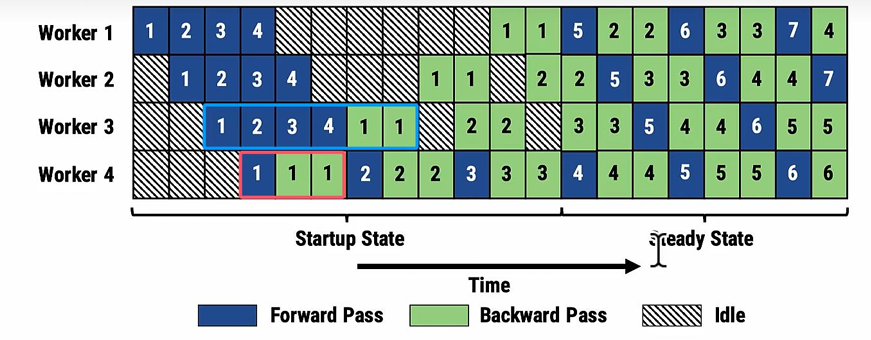
这是一种时间换空间的方法,可以看到backward是forward时间的两倍,这里表示forward过程不保留激活值,而是在backward的时候,重新推理一遍前向获取激活值,这样每张卡都不用拿多的显存来保留激活值了。
VPP
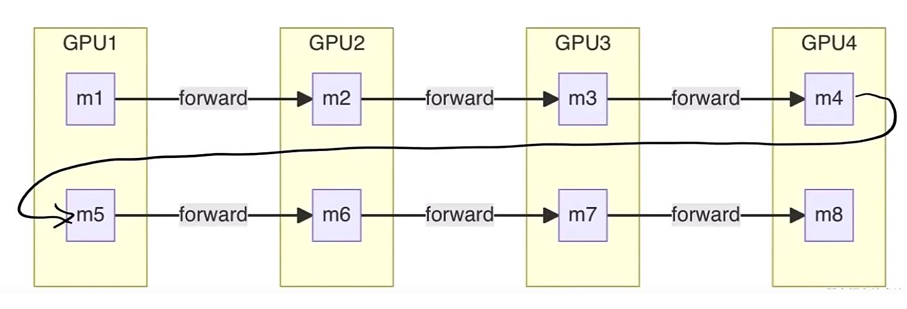
VPP是1F1B的进阶版,主要是采用Round Robin的方式把不同层按顺序依次划分到N个GPU上,即每个gpu会经过多轮的forward,才完成一次完整的前向。

从图中我们也可以看出来,VPP相比于1F1B主要做的工作其实从逻辑上看,是把原来的一个比较大块的forwrad切分成了更小的粒度,这么做的好处是,虽然编排后,bubble的率,即bubble个数占整个job编排个数的比例并没有变,但是每个bubble时间占总时间的比例变小了,原来forward一次需要tf的时间,切分成v份后,就只需要tf/v的时间,因此bubble的时间也相应减少为1/v。

那是不是我们把模型分成更多份,让这个V越来越大,整个bubble时间越小,效率就越高呢?
答案肯定是否定的,因为这里要注意一个问题,GPU间点对点通信次数,为vpp_degree倍,切分的越多,意味着通信量成倍的上升,这也是影响性能的关键,因此不能盲目的增加vpp_degree。
VPP的编排公式如下(cool_down阶段与warm_up阶段对称,因此不需要写,注意需要判断一下total_steps和warm_up_steps的大小,):
这里warm_up_steps的公式怎么理解呢?
这里可以拆解为两步计算如下:
1. 计算 warmup_steps 的初始值:
2.更新 warmup_steps:
这里解读一下这两个公式的具体来源:
首先我们先解释公式2的由来:可以注意到,最先开始做1F1B的一定是最后一个rank,即当第一个micro_batch经过vpp_degree轮在所有rank间的循环后,它来到最后一个模型块,做最后的forward,接下来就准备开始它的backward的阶段了。所以最后一个rank一定会做(vpp_degree-1)*pp_degree步的forward(这里把最后一个模型块做forward的部分给剔除了,因为他会被算在steady阶段),既然最后一个rank会做这么多forward,那么其它rank也同样会做这么多的forward。
其次我们分析一下第一个公式,由这个对称性其实就可以知道,它是由forward和backward共同产生的。其实这个原因跟1F1B很相似,就是因为最开始forward过程,第一个rank先开始,所以后续rank会空转,那么相对于其它rank,rank0就会多处理个数据,而backward也同样如此。所以在这里读者估计会和我有一样的困惑,为什么1F1B不乘以2呢?
我们对比一下1F1B和VPP,首先从全局视角来看,最早能出现backward的时间步位置在(假设forward和backward的时间相同):
这里也比较容易理解,第一个micro_batch传到从当前stage传到最后��一个stage的过程中,当前stage会产生个时间步,而当第一个micro_batch的backward从最后一个stage传到当前stage,当前stage又会产生个时间步,而最后一个stage做一个forward加一个backward,当前stage会产生2个时间步,所以最终得到上面的式子。
这个公式说明了什么?
说明在warm_up阶段,每个stage最�多可以安排个时间步的操作,即,即使不按传统的1F1B或VPP来安排warm_up的时间步,也不会影响流水线正常进行,即整个时间不会增加也不会减少。可以从如下图看出:
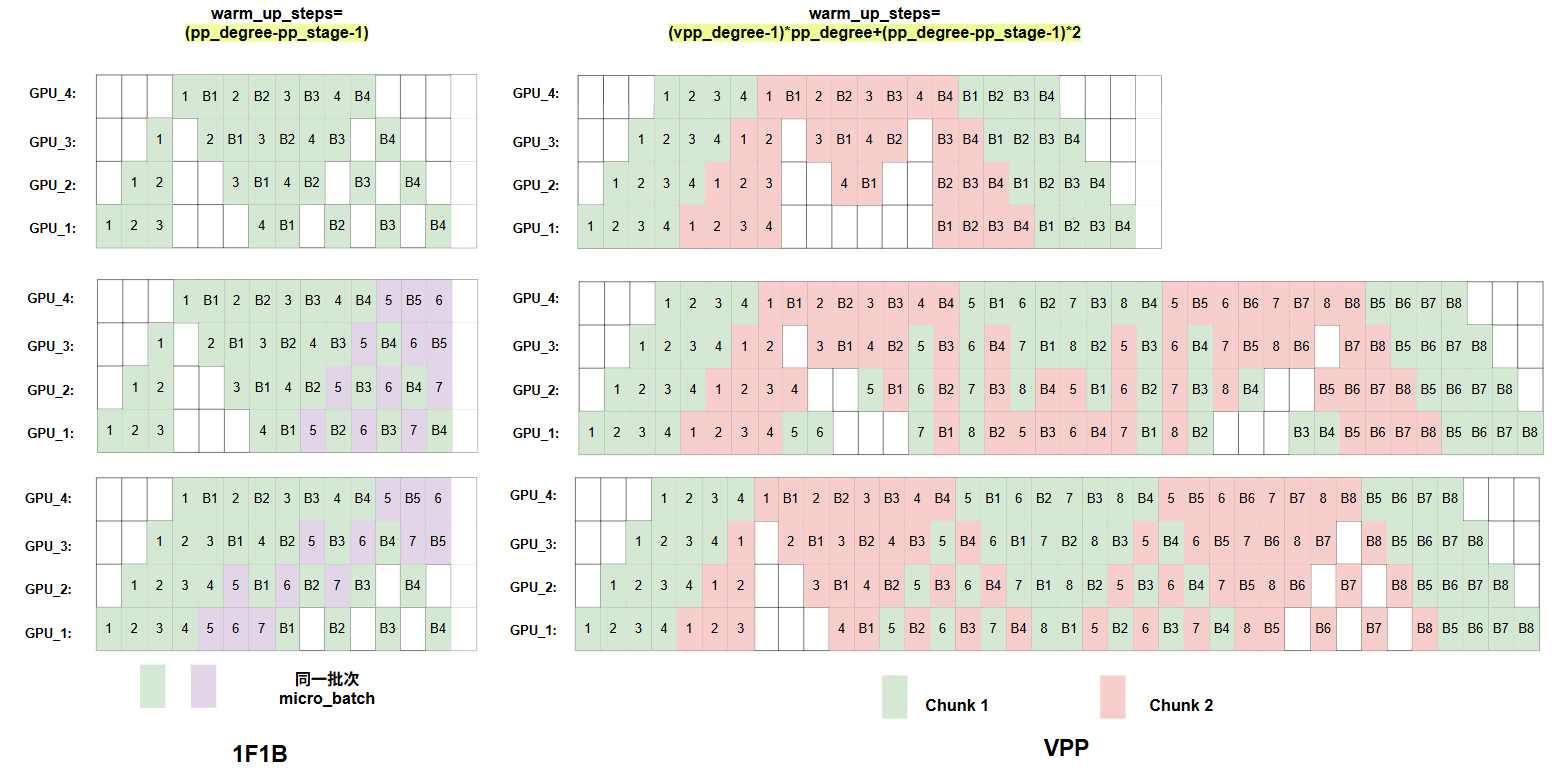
先看左边1F1B的图,左上角第一个是pp_degree=4,micro_batch=4的流水并行图,紧接着我们插入新的micro_batch,为了严格遵守warm_up_step=(pp_degree-pp_stage-1),所以我们新的micro_batch选择插空填在后面,而紧接着下面一幅图,我们不遵守warm_up_step,直接插空填新的micro_batch。可以发现,因为最后一个rank始终是紧密排列的,所以总的PP并行的时间其实二者没有区别。但是我们会发现,两种方法,前者的显存峰值,要低于后者,因为前者将更多的micro_batch安排在1F1B过程进行,则每次都会释放一个activation值,这样可以降低峰值显存。所以其实1F1B也可以warm_up_step=(pp_degree-pp_stage-1)*2,但是并不减少时间,还会增大显存峰值,因此没有必要。
再看右边的VPP的图,第一幅图是标准的pp_degree=4,micro_batch=4的流水并行图。紧接着我们插入新的micro_batch,同样严格遵守warm_up_step=(pp_degree-pp_stage-1)*2+(vpp_degree-1)*pp_degree(此时pp_degree=8,micro_batch=4),而我们可以联想到,既然1F1B可以把warm_up_step控制在(pp_degree-pp_stage-1),那除去(vpp_degree-1)*pp_degree表�示当前GPU上前几个chunk必须要经过的时间步,我们是不是同样可以不乘以2,让warm_up_step最小呢,即等于(pp_degree-pp_stage-1),考虑到这一点,我就对原来的pp_degree=8,micro_batch=4进行了重排,可以发现,这时候总时间仍然没变,但是可以相对减少GPU的显存峰值,当然,二者只是一个二倍的关系,并且只与设备数有关,所以优化不是特别明显,但这个工作证明了,VPP在最后一层的数量计算上,确实可以和1F1B对齐。
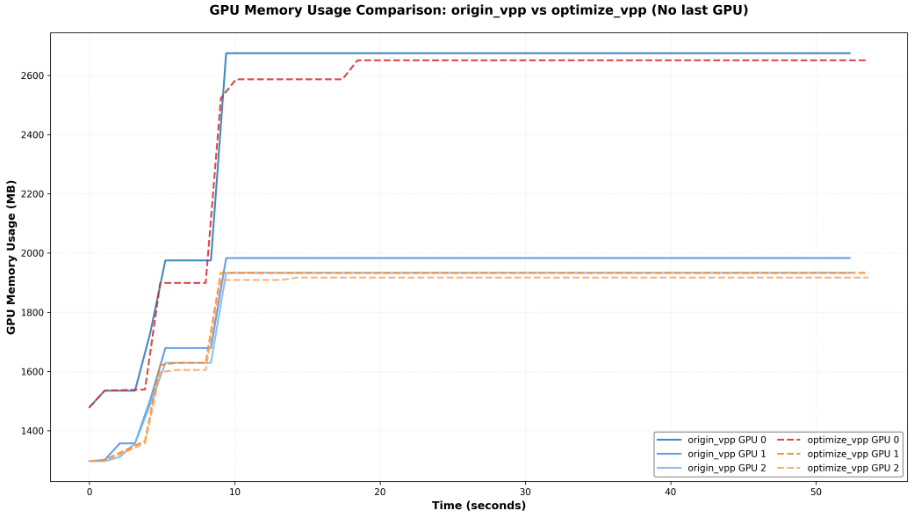
这里展示了4卡下的VPP,优化前后优化后,显存峰值,确实优化的不是很多,由于笔者机器有限,大家可以自行尝试,也许在像生产中96卡的情况下,还是能节省较大显存的。
VPP如何编排不同chunk(即vpp_stage)的forward和backward?
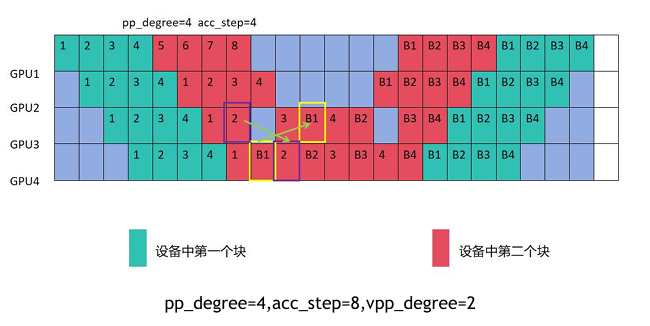
前面讲了如何去计算每个阶段的stage数,而有了stage数,对于VPP,由于每个GPU上存在不同的模型块,因此我们在编排的时候还需要知道,什么时候该编排哪一块,所以一般传统的VPP遵循的公式即:
这里的公式也比较好理解,首先求出来是一轮完整的forward或者bakcward经过的pp_stage数。而用micro_step求余,我们可以知道当前micro_batch在一轮中的哪个pp_stage上。我们注意当的时候,则step最大值刚好等于一轮完整的pp_stage数,因为经过某一个GPU的micro_batch数为,而一轮完整的forward或者backward经过的pp_stage数为,所以此时step刚好等于一轮的pp_stage数,所以也可以看出,当micro_batch大于pp_stage数时,就会超过,因此这里用的求余操作。而知道在哪个pp_stage后,再用公式2即可得到其在当前GPU的哪一个模型块上(每个模型块编号都从0开始)。
1F1B和VPP都可能出现的死锁问题!
注意看,对于最后两个pp_rank来说,存在一个现象即GPU3做完forward给GPU4发送计算的activation值,而GPU4做完了B1向GPU3发送backward的grad值,此时GPU3等待GPU4接收到数据,再做下一个计算,而GPU4也在等待GPU3接收数据,再做接收GPU3传来的forward的数据做下一个计算,此时就会造成通信�死锁。因此需要对send,recv通信和forward,backward计算做一个解耦,如下所示:
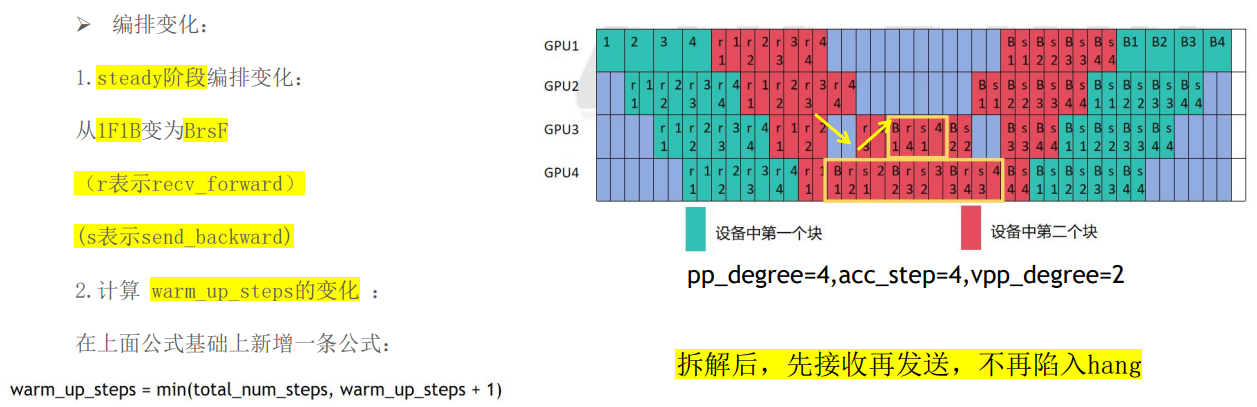
将forward操作拆解为recv_forward和forward(注意这里只拆了recv_forward,没有拆send_forward),将backawrd拆解为backward和send_backward(只拆了send_backward,没拆recv_backward),这样在1F1B阶段,始终保持先recv_forwrad再send_backwrad的顺序,即可解决死锁问题。
Zero Bubble
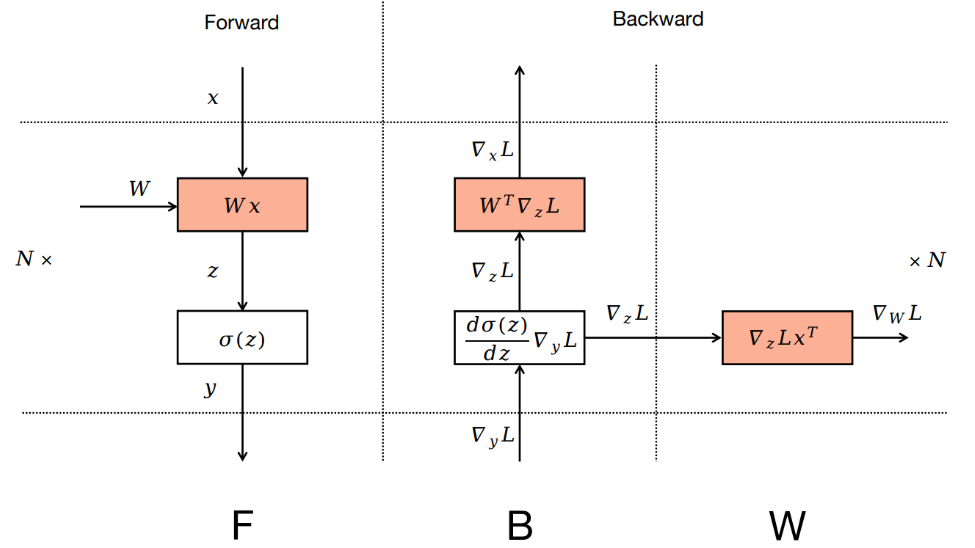
首先Zero Bubble的第一个优化点,就是将backward过程拆解成两个阶段,一个是对weight求导,一个是对输入input求导,我们需要注意,在backward的求导过程中,我们对weight和input求导,需要获取到链式法则传递下来的导数,▽L/▽Z,而这个就是当前层输出的导数(也就是下一层的输入的导数),而有了这个导数就可以对weight和input求导。而当我们对input求导完成后,即使weight没有求导,仍然可以计算传递链式导数,到下一层求导,weight是否求导完成仅仅影响最后梯度的更新,因此我们可以将backward拆解,仅仅保证对输入input求导有序进行,并在这之间插入对weight的求导即可。(注意当前层weight的求导在插入时,需要保证上一层的input求导已经完成。)

1F1B
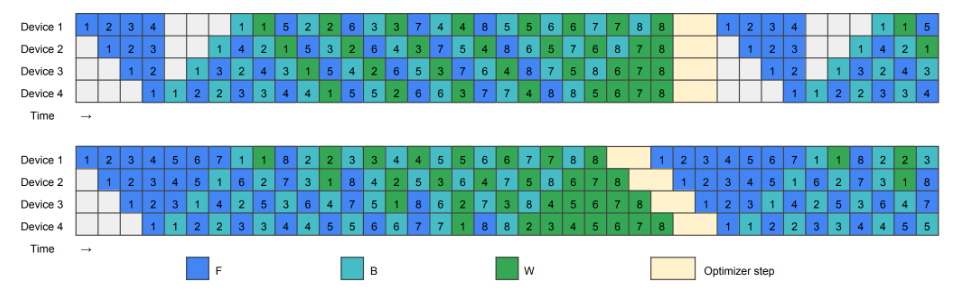
Zero Bubble
Zero Bubble也是在1F1B的基础上进行改进,分为两种,这里以ZB-H1和ZB-H2来讲解。首先ZB-H1是保证显存峰值不超过1F1B来编排的,可以看到,相比于1F1B来说,整个时间降低到了原来的1/3。而ZB-H2是显存峰值超过1F1B的情况进行编排,这样能在流水并行的过程中首先零bubble,但是注意这里移除了优化器步骤之间的同步。
在传统的PP实践中,为了数值稳健性,通常会在优化器步骤执行的管道阶段加上同步,例如需要计算全局梯度范数进行梯度裁剪、或者混合精度中执行NAN和INF值得全局检查,这两者都要跨所有阶段进行全局规约。因此论文移除优化器步骤需要考虑这个问题,于是提出了后验证的方式。
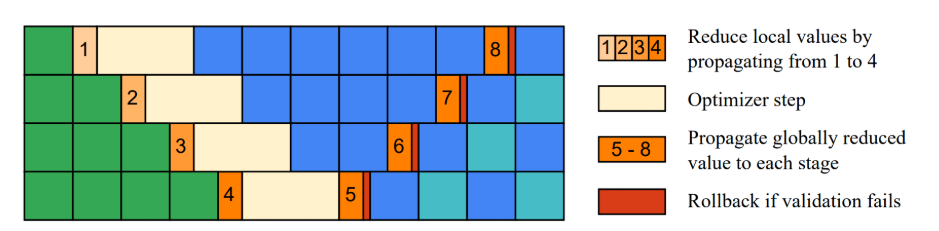
如图,逐个rank可以一次从前一个阶段接收到一个部分规约的局部信息,和当前局部状态融合,传递到下一个阶段,而当发现NAN或部分归约梯度范数超过裁剪阈值时,跳过更新。在下一次迭代的warmup阶段,完全规约的全局状态从最后一个阶段传播回第一个阶段,这时候每个阶段都有了全局状态,并以此来验证前一个优化器是否合法。如果不合法,则回滚,根据完全规约的全局状态,重新执行优化器步骤。
优化器回滚
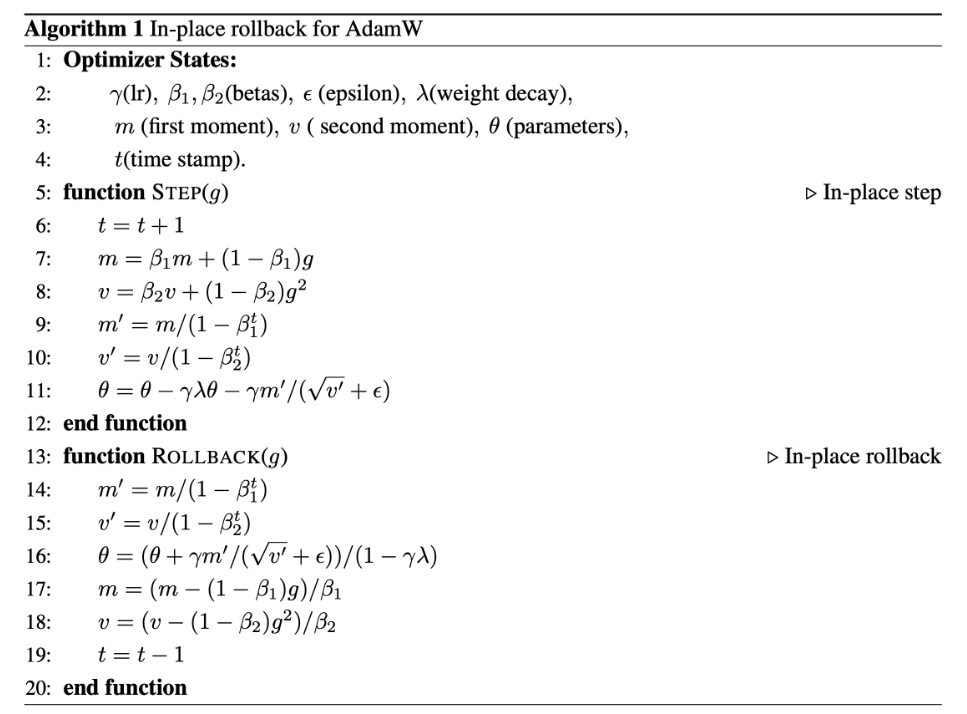
当回滚优化器的时候,一种方法是保存全部的历史版本的参数和优化器抓鬼太,并在需要时恢复,但这种方法在内存上效率低下。因此论文针对AdamW优化器提出了回滚方法,因为优化器的更新公式,是可以逆运算的,所以根据逆运算计算回之前的状态即可。
最佳调度方案
同事为了适应更多的场景,论文提出了一种可自动搜索最佳调度方案的算法,一种启发式策略,可以在为批次足够大时生成接近最优解。
启发式算法有以下步骤:
- 热身阶段: 在内存允许的情况下,尽可能安排更多的 F,以减少第一个 B 前的等待时间。如果内存还有余量,可以安排额外的 F,但可能会延迟后续的 B。
- 稳定阶段: 在热身阶段后,我们交替安排 F 和 B。当有空闲时间超过 W 时,插入 W填充等待时间。即使等待时间不足 W,但当前等待时间会增加所有阶段中最大的等待时间时,我们也会插入 W。当内存接近饱和时,也会插入 W 释放一些内存(W需要activation的数据)。
- 阶段间调度: 确保每个阶段在用尽 F之前至少安排一个比下一个阶段更多的 F。当差异超过一定阈值时,考虑跳过某些阶段中的 F。
- 资源用尽: 在每个阶段,当 F 和 B 任务完成时,按顺序安排所有剩余的 W任务。
3.4 序列并行(SP)
Megatron提出的序列并行
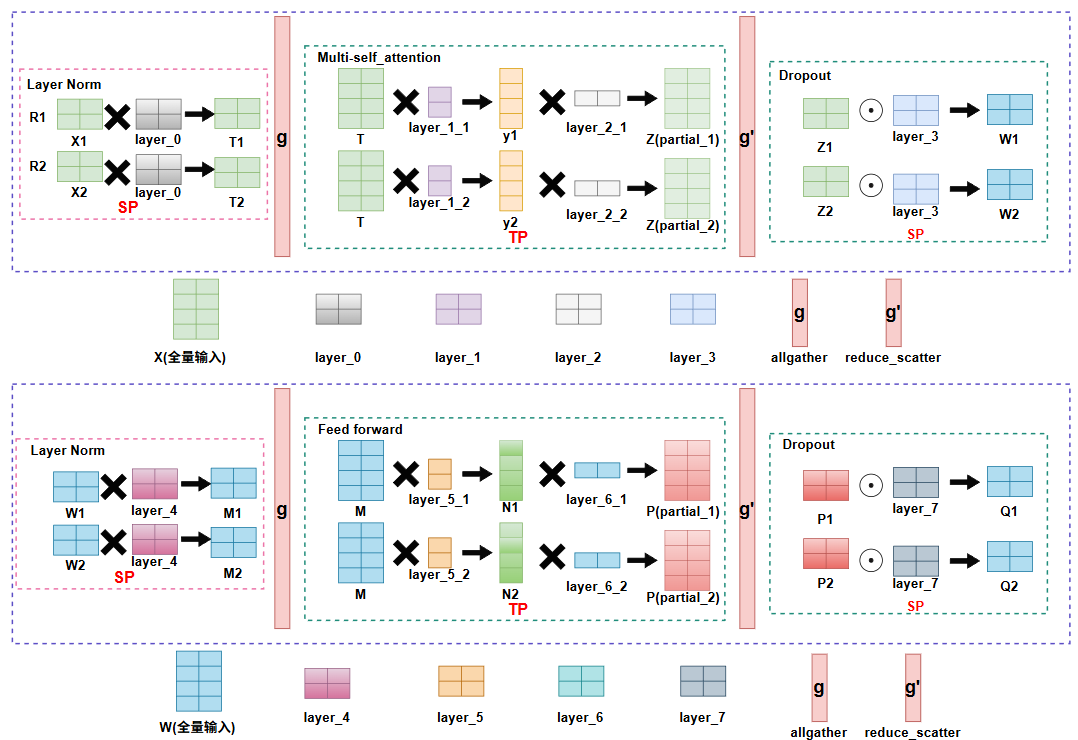
其实是结合了TP的特点,因为TP的RowParral输出时,需要调用all-reduce进行通信,将不同rank上的partial状态的输出给求和,所有rank得到全局输出,而all-reduce可以拆解为reduce_scatter和allgather。而引入SP后,我们可以发现,我们先做reduce_scatter,让每个rank得到全局输出的一部分,这样每个rank只需要计算部分数据的LayerNorm和Dropout,整个计算量被分摊到不同rank上,这样保存的在backward需要用到的activation数据也可以减少,从而减少每个rank的显存。而在进入如Multi-self_attention 和Feed Forward这种需要TP的层时,再调用all gather通信把SP层的数据收集起来,丢给TP层做计算。相当于把TP的通信拆分,这样整个过程SP+TP相比于TP通信量并没有变,并且还减少了显存的压力。
SP是对沿着seq_len,也就是序列维度进行切分,但是它切的层都在MLP层,即这些层,不同token之间是没有强关联性的。比如第一个token做归一化并不需要看第100个token的数据。
SP的提出主要是节省了MLP层的这些activation数据的显存,但是在计算超长序列时,multi-self_attention层在训练时仍然会需要N×N这么大的显存数据,N为序列长度,进一步能够解决超长序列文本的训练,CP被提出。
所以整个forward就需要2次reduce_scatter和allgather,再加上backward,通信量一共就是4次reduce_scatter和allgather。
注意为什么这里进入Feed forward前需要用allgather把数据合起来,原因是Feed forward这一层的参数被TP切分了,而每份参数都要和完整输入相乘。
通信与计算重叠(主要讨论Transfomer_Engine下的实现)
从上图可以看出SP+TP的组合,这里把原来TP的all-reduce通信拆分成了allgather+reduce_scatter,那么我们就分别讨论一下,allgather和reduce_scatter两部分如何做通信与计算的重叠。
allgather overlap(CommOverlapP2PBase::split_overlap_ag函数)
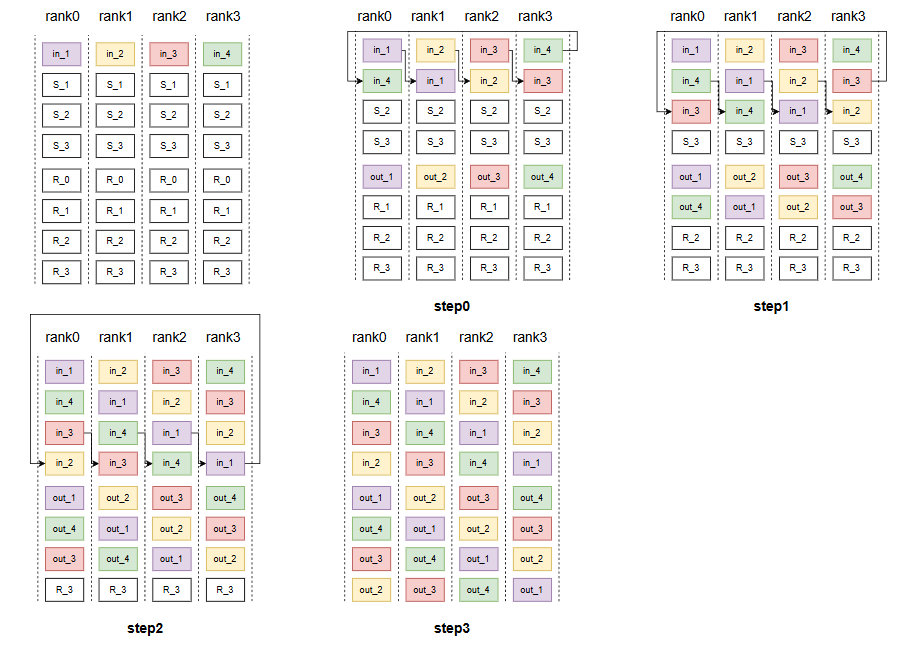
可以看到,这里计算和通信的overlap是采用的标准的Ring算法,即每个rank只会给相邻的rank发送数据,进行n-1轮发送和接收后,数据即传遍了所有的设备,并且每次发送和接收数据的同时,使用当前rank上一轮接受过的数据进行计算得到当前chunk的输出,最后一轮不再通信,只计算最后一块数据即可。下面的split_overlap_ag方法还实现了Aggregate Mode,将相邻两块GPU看作同一个rank,即先两两相邻的rank交换数据([0,1],[2,3]...),接下来每2步跨度使用ring方法发送和接收数据,即rank0发送给rank2,rank1发送给rank3,接收也同样如此。这样做的好处是充分利用高带宽,以及减少通信次数。
void CommOverlapP2PBase::split_overlap_ag(const TensorWrapper &A, bool transa,
const TensorWrapper &B, bool transb, TensorWrapper &D,
TensorWrapper &bias, TensorWrapper &pre_gelu_out,
TensorWrapper &workspace, bool grad, bool accumulate,
bool use_split_accumulator, TensorWrapper &B_copy,
cudaStream_t stream_main) {
// ===== 第一部分:初始化和参数准备 =====
int ori_sms = _ub_comm->sms; // 保存原始 SM 数量,用于后续恢复,避免影响其他操作
_ub_comm->use_ce = _use_ce; // 设置是否使用 Collective Engine(NVIDIA 的硬件加速通信引擎)
_ub_comm->sms = _num_comm_sm; // 设置通信使用的 SM 数量,实现计算和通信的资源隔离
// 通过限制通信使用的 SM,确保 GEMM 计算有足够的 SM 资源
_ub_comm->cga_size = _cga_size; // 设置 CGA (Cooperative Group Array) 大小,用于优化通信性能
// 计算 GEMM 维度:根据 A 是否转置,动态确定矩阵维度
// 矩阵乘法:D = A @ B,其中 A 的形状取决于 transa,B 的形状取决于 transb
const size_t m = (transa) ? A.size(0) : A.size(1); // 输出矩阵 D 的行数
// 如果 A 转置:A^T 的形状是 [k, m],所以 m = A.size(0)
// 如果 A ��不转置:A 的形状是 [m, k],所以 m = A.size(1)
const size_t k = (transa) ? A.size(1) : A.size(0); // A 的列数 = B 的行数(用于矩阵乘法)
// 如果 A 转置:A^T 的列数是 A.size(1)
// 如果 A 不转置:A 的列数是 A.size(0)
const size_t n_chunk = _ubufs[0].size(0); // 每个 rank 持有的 B 的分块大小 = n / tp_size
// _ubufs[0] 是 userbuffer 的第一个 chunk,代表每个 rank 初始持有的 B 的一部分
// 在 Ring AllGather 过程中,每个 rank 会逐步收集所有 chunks,最终得到完整的 B
// 计算通信和输出的分块大小
const int comm_bytes = _ubufs[0].bytes(); // 每个分块的字节数
// 这是 userbuffer 中每个 chunk 的大小,用于计算内存偏移量
// 所有 chunks 大小相同,存储在连续的 _ubuf 缓冲区中
const bool do_gelu = pre_gelu_out.numel() > 0; // 是否需要 GELU 激活
// 如果 pre_gelu_out 不为空,说明需要保存 GELU 激活前的输出(用于反向传播)
size_t workspace_size_chunk = workspace.numel() / _stream_compute.size(); // 每个计算流的工作空间大小
// 如果有多个计算流,需要将 workspace 平均分配给每个流,避免冲突
// 验证 B_copy 缓冲区大小(用于反向传播时保存 AllGather 后的完整 B 矩阵)
// 在反向传播时,需要完整的 B 矩阵来计算梯度,所以需要将 AllGather 后的 B 保存到 B_copy
if (B_copy.numel() > 0) {
NVTE_CHECK(B_copy.numel() == _ubuf.numel(), "Expected all-gathered B copy buffer with ",
_ubuf.numel(), " elements but got ", B_copy.numel());
// 检查 B_copy 的元素数量是否等于 _ubuf 的元素数量
// _ubuf 存储了 AllGather 后的完整 B 矩阵,所以 B_copy 必须能容纳所有元素
NVTE_CHECK(B_copy.element_size() == _ubuf.element_size(),
"Expected all-gathered B copy buffer with ", _ubuf.element_size() * 8,
"-bit data type but got ", B_copy.element_size() * 8, "-bit");
// 检查 B_copy 的数据类型是否与 _ubuf 一致(例如都是 float16 或 bfloat16)
}
// ===== 第二部分:流同步初始化 =====
// 在主流上记录起始事件,用于同步所有子流,确保所有流从同一时间点开始执行
// 这是实现流水线重叠的关键:通过 Event 同步而非阻塞式同步,允许不同流并行执行
NVTE_CHECK_CUDA(cudaEventRecord(_start_compute, stream_main));
NVTE_CHECK_CUDA(cudaStreamWaitEvent(_stream_send[0], _start_compute, 0)); // 发送流等待主流
// _stream_send[0] 用于发送数据到下一个 rank
NVTE_CHECK_CUDA(cudaStreamWaitEvent(_stream_recv, _start_compute, 0)); // 接收流等待主流
// _stream_recv 用于从上一个 rank 接收数据
for (size_t i = 0; i < _stream_compute.size(); i++) {
NVTE_CHECK_CUDA(cudaStreamWaitEvent(_stream_compute[i], _start_compute, 0)); // 所有计算流等待主流
// _stream_compute[i] 用于执行 GEMM 计算
// 可能有多个计算流,允许多个 GEMM 并行执行
}
// ===== 第三部分:聚合模式 (Aggregate Mode) =====
// �当 _aggregate = true 时,使用 2X chunks 的聚合模式,减少通信轮数(从 tp_size 轮减少到 tp_size/2 轮)
// 适用场景:当通信带宽充足但延迟较高时,聚合模式可以减少通信轮数,提高效率
// 代价:每次通信的数据量翻倍(2X chunks),但总通信量不变
if (_aggregate) {
const int num_steps = _tp_size / 2; // 聚合模式下只需 tp_size/2 步
// 因为每次处理 2 个 chunks,所以轮数减半
// 定义 2X chunks 的维度(每次处理 2 个分块,减少通信轮数但增加每次通信的数据量)
std::vector<size_t> input_b_chunk_shape =
(transb ? std::vector<size_t>{k, 2 * n_chunk} : std::vector<size_t>{2 * n_chunk, k});
// 如果 B 转置:B^T 的形状是 [k, n],所以每个 2X chunk 的形状是 [k, 2*n_chunk]
// 如果 B 不转置:B 的形状是 [n, k],所以每个 2X chunk 的形状是 [2*n_chunk, k]
std::vector<size_t> output_chunk_shape = {2 * n_chunk, m}; // 输出 D 的 2X chunk 形状
size_t input_b_chunk_size = 2 * n_chunk * k; // 2X 输入分块大小(元素数量)
size_t output_chunk_size = 2 * n_chunk * m; // 2X 输出分块大小(元素数量)
// 初始交换阶段:在相邻 rank 之间交换 1X chunk,为后续的 2X chunks 交换做准备
// 目的:让每个 rank 都有 2X chunks 的数据,才能开始 2X chunks 的 Ring exchange
int send_chunk_id = _tp_id; // 发送自己的 chunk ID(即当前 rank 的 ID)
// 每个 rank 初始持有自己的 chunk,需要发送给邻居
int recv_chunk_id = (_tp_id % 2 == 0) ? _tp_id + 1 : _tp_id - 1; // 接收相邻 chunk ID
// 偶数 rank 接收 +1(例如 rank 0 接收 chunk 1)
// 奇��数 rank 接收 -1(例如 rank 1 接收 chunk 0)
// 这样确保相邻 rank 配对交换
// 计算内存偏移量:_ubuf 是一个连续的内存缓冲区,存储了所有 chunks
// 每个 chunk 的大小是 comm_bytes,所以第 chunk_id 个 chunk 的起始位置就是 comm_bytes * chunk_id
int send_offset = comm_bytes * send_chunk_id; // 发送 chunk 在 _ubuf 中的字节偏移量
// 用于定位要发送的数据在缓冲区中的位置
// 例如:chunk 0 的偏移是 0,chunk 1 的偏移是 comm_bytes
int recv_offset = comm_bytes * recv_chunk_id; // 接收 chunk 在 _ubuf 中的字节偏移量
// 用于定位接收到的数据应该存储在缓冲区的哪个位置
// 这样确保每个 chunk 都存储在正确的位置,最终形成连续的 AllGather 结果
int peer_rank = (_tp_id % 2 == 0) ? _next_rank : _prev_rank; // 选择邻居 rank
// 偶数 rank 与下一个 rank 交换(_next_rank)
// 奇数 rank 与上一个 rank 交换(_prev_rank)
// 执行初始的 1X chunk 交换:使用 userbuffers 进行点对点通信
userbuffers_send(_ub_reg, send_offset, _ub_reg, send_offset, comm_bytes, _ub_comm, peer_rank,
_stream_send[0]);
// 参数说明:
// _ub_reg: userbuffer 注册 ID
// send_offset: 发送数据的源偏移量(在本地 _ubuf 中的位置)
// _ub_reg, send_offset: 发送数据的目标偏移量(在远程 rank 的 _ubuf 中的位置,这里使用相同偏移量)
// comm_bytes: 发送的字节数(1X chunk 的大小)
// peer_rank: 目标 rank
// _stream_send[0]: 使用的发送流
userbuffers_recv(_ub_reg, recv_offset, _ub_reg, recv_offset, comm_bytes, _ub_comm, peer_rank,
_stream_recv);
// 参数说明:
// recv_offset: 接收数据的目标偏移量(在本地 _ubuf 中的位置)
// 其他参数与 send 类似,但方向相反
// 等待接收完成,然后同步发送流和第一个计算流
// 这是流水线的关键:确保数据已就绪,才能开始计算和下一轮通信
NVTE_CHECK_CUDA(cudaEventRecord(_stop_recv, _stream_recv)); // 记录接收完成事件
NVTE_CHECK_CUDA(cudaStreamWaitEvent(_stream_send[0], _stop_recv, 0)); // 发送流等待接收完成
// 确保缓冲区可用,避免数��据竞争
NVTE_CHECK_CUDA(cudaStreamWaitEvent(_stream_compute[0], _stop_recv, 0)); // 第一个计算流等待接收完成
// 确保输入数据已就绪,才能开始 GEMM 计算
// Ring Exchange 阶段:计算本地 rank 在 2X chunks 模式下的起始位置和邻居 rank
int local_rank_round2 = (_tp_id % 2 == 0) ? _tp_id : _tp_id - 1; // 对齐到偶数位置
// 偶数 rank 保持不变,奇数 rank 减 1
// 这样确保所有 rank 从偶数位置开始 2X chunks 的交换
const int next_rank = (_tp_size + _tp_id + 2) % _tp_size + _rank_round_tp; // 下一个 rank(步长为 2)
// 例如:rank 0 -> rank 2 -> rank 0(环形)
// _rank_round_tp 确保在同一 tensor parallel group 内
const int prev_rank = (_tp_size + _tp_id - 2) % _tp_size + _rank_round_tp; // 上一个 rank(步长为 2)
// 例如:rank 2 -> rank 0 -> rank 2(环形)
// Ring exchange 循环:每次处理 2X chunks,总共 num_steps 轮
for (int i = 0; i < num_steps; i++) {
// 计算当前迭代要发送和接收的 chunk ID(步长为 2)
// 这些 chunk ID 决定了在 Ring exchange 过程中,每个 rank 处理哪些 chunks
send_chunk_id = (_tp_size + local_rank_round2 - i * 2) % _tp_size;
// 发送的 chunk ID:从 local_rank_round2 开始,每次减 2,模 tp_size 确保在有效范围内
// 例如:rank 0, i=0 -> chunk 0; i=1 -> chunk (0-2) % 4 = chunk 2
recv_chunk_id = (_tp_size + local_rank_round2 - i * 2 - 2) % _tp_size;
// 接收的 chunk ID:比发送的 chunk ID 小 2
// 例如:rank 0, i=0 -> chunk (0-2) % 4 = chunk 2; i=1 -> chunk (0-4) % 4 = chunk 0
// 计算内存偏移量:根据 chunk ID 计算在 _ubuf 缓冲区中的字节偏移量
send_offset = comm_bytes * send_chunk_id; // 发送 chunk 的字节偏移量
// 用于定位要发送的 2X chunks 在缓冲区中的起始位置
recv_offset = comm_bytes * recv_chunk_id; // 接收 chunk 的字节偏移量
// 用于定位接收到的 2X chunks 应该存储在缓冲区的哪个位置
// 这样确保每个 chunk 都存储在正确的位置,最终形成连续的 AllGather 结果
// GEMM 计算:使用当前可用的 2X chunks 进行矩阵乘法
// 获取输入和输出的 tensor chunks,这些 chunks 指向 _ubuf 缓��冲区中的相应位置
auto input_b_chunk =
get_buffer_chunk_like(B, input_b_chunk_size * send_chunk_id / 2, input_b_chunk_shape);
// 获取 B 的 2X chunk:从 B 的起始位置偏移 input_b_chunk_size * (send_chunk_id / 2)
// send_chunk_id / 2 是因为在 2X chunks 模式下,chunk ID 需要除以 2 来得到实际的 2X chunk 索引
// 例如:send_chunk_id = 0 或 1 都对应第一个 2X chunk(索引 0)
auto output_chunk =
get_tensor_chunk(D, output_chunk_size * send_chunk_id / 2, output_chunk_shape);
// 获取 D 的 2X chunk:从 D 的起始位置偏移 output_chunk_size * (send_chunk_id / 2)
auto aux_chunk = (do_gelu)
? get_tensor_chunk(pre_gelu_out, output_chunk_size * send_chunk_id / 2,
{n_chunk * 2, k})
: TensorWrapper(nullptr, std::vector<size_t>{0}, pre_gelu_out.dtype());
// 如果需要 GELU 激活,获取 pre_gelu_out 的 2X chunk(用于保存激活前的输出)
auto workspace_chunk = get_tensor_chunk(
workspace, (i % _stream_compute.size()) * workspace_size_chunk, {workspace_size_chunk});
// 获取工作空间 chunk:根据迭代次数和计算流数量,轮询分配工作空间
// 这样允许多个计算流并行执行,每个流使用不同的工作空间,避免冲突
// 执行 GEMM:D[chunk] = A @ B[chunk] + bias(在独立的计算流上,与通信并行)
// 这是流水线的核心:计算和通信同时进行,最大化 GPU 利用率
nvte_cublas_gemm(A.data(), input_b_chunk.data(), output_chunk.data(), bias.data(),
aux_chunk.data(), transa, transb, grad, workspace_chunk.data(), accumulate,
use_split_accumulator, _math_sms,
_stream_compute[i % _stream_compute.size()]);
// 参数说明:
// A: 输入矩阵 A(所有 ranks 共享,不需要通信)
// input_b_chunk: B 的 2X chunk(从 _ubuf 缓冲区中获取,已通过 Ring exchange 收集)
// output_chunk: D 的 2X chunk(输出结果)
// bias: 偏置向量(可选)
// aux_chunk: GELU 激活前的输出(可选)
// transa, transb: 转置标志
// grad: 是否为反向传播
// workspace_chunk: 工作空间
// accumulate: 是否累加到输出
// use_split_accumulator: 是否使用分块累加器(提高数值精度)
// _math_sms: 用于 GEMM 的 SM 数量(排除通信使用的 SM)
// _stream_compute[i % _stream_compute.size()]: 使用的计算流(轮询分配)
// 通信阶段(如果不是最后一步):发送 2X chunks 到下一个 rank,从上一个 rank 接收 2X chunks
if (i < num_steps - 1) {
userbuffers_send(_ub_reg, send_offset, _ub_reg, send_offset, comm_bytes * 2, _ub_comm,
next_rank, _stream_send[0]);
// 发送 2X chunks:comm_bytes * 2 表示 2 个 chunks 的大小
// send_offset 是发送数据的起始位置(在本地 _ubuf 中)
userbuffers_recv(_ub_reg, recv_offset, _ub_reg, recv_offset, comm_bytes * 2, _ub_comm,
prev_rank, _stream_recv);
// 接收 2X chunks:recv_offset 是接收数据的目标位置(在本地 _ubuf 中)
// 记录接收完成事件,用于同步下一次迭代
NVTE_CHECK_CUDA(cudaEventRecord(_stop_recv, _stream_recv));
NVTE_CHECK_CUDA(cudaStreamWaitEvent(_stream_send[0], _stop_recv, 0)); // 发送流等待接收完成
// 确保缓冲区可用,避免数据竞争
NVTE_CHECK_CUDA(
cudaStreamWaitEvent(_stream_compute[(i + 1) % _stream_compute.size()], _stop_recv, 0)); // 下一个计算流等待接收完成
// 确保输入数据已就绪,才能开始下一次 GEMM 计算
}
}
} else {
// ===== 第四部分:标准 Ring 模式 =====
// 当 _aggregate = false 时,使用标准的 Ring AllGather 模式,每轮处理 1X chunk,总共 tp_size 轮
// 这是�更常见的模式,每次通信的数据量较小,但通信轮数较多
// 定义标准 1X chunks 的维度
std::vector<size_t> input_b_chunk_shape =
(transb ? std::vector<size_t>{k, n_chunk} : std::vector<size_t>{n_chunk, k});
// 如果 B 转置:B^T 的形状是 [k, n],所以每个 1X chunk 的形状是 [k, n_chunk]
// 如果 B 不转置:B 的形状是 [n, k],所以每个 1X chunk 的形状是 [n_chunk, k]
std::vector<size_t> output_chunk_shape = {n_chunk, m}; // 输出 D 的 1X chunk 形状
size_t input_b_chunk_size = n_chunk * k; // 1X 输入分块大小(元素数量)
size_t output_chunk_size = n_chunk * m; // 1X 输出分块大小(元素数量)
// Ring AllGather 主循环:总共需要 tp_size 轮,每轮处理一个 chunk
// 算法原理:每个 rank 初始持有自己的 chunk,通过 Ring 拓��扑逐步交换,最终每个 rank 都收集到所有 chunks
for (int i = 0; i < _tp_size; i++) {
// 计算当前迭代要处理的 chunk ID
// send_chunk_id: 当前要发送的 chunk(也是当前要计算的 chunk)
// recv_chunk_id: 当前要接收的 chunk(用于下一轮计算)
// 通过 (tp_id - i) % tp_size 确保每个 rank 最终收集到所有 chunks,且顺序一致
// 例如:rank 0 处理顺序是 chunk 0, 3, 2, 1;rank 1 处理顺序是 chunk 1, 0, 3, 2
int send_chunk_id = (_tp_size + _tp_id - i) % _tp_size;
// 发送的 chunk ID:从 _tp_id 开始,每次减 1,模 tp_size 确保在有效范围内
// 例如:rank 0, i=0 -> chunk 0; i=1 -> chunk 3; i=2 -> chunk 2; i=3 -> chunk 1
int recv_chunk_id = (_tp_size + _tp_id - i - 1) % _tp_size;
// 接收的 chunk ID:比发送的 chunk ID 小 1
// 例如:rank 0, i=0 -> chunk 3; i=1 -> chunk 2; i=2 -> chunk 1; i=3 -> chunk 0
// 计算内存偏移量:根据 chunk ID 计算在 _ubuf 缓冲区中的字节偏移量
// _ubuf 是一个连续的内存缓冲区,按照 chunk_id 顺序存储所有 chunks
// 每个 chunk 的大小是 comm_bytes,所以第 chunk_id 个 chunk 的起始位置就是 comm_bytes * chunk_id
int send_offset = comm_bytes * send_chunk_id; // 发送 chunk 在 _ubuf 中的字节偏移量
// 用于定位要发送的数据在缓冲区中的位置
// 例如:chunk 0 的偏移是 0,chunk 1 的偏移是 comm_bytes,chunk 2 的偏移是 2*comm_bytes
// 这样确保每个 chunk 都存储在正确的位置,最终形成连续的 AllGather 结果
int recv_offset = comm_bytes * recv_chunk_id; // 接收 chunk 在 _ubuf 中的字节偏移量
// 用于定位接收到�的数据应该存储在缓冲区的哪个位置
// 例如:接收 chunk 3 时,偏移是 3*comm_bytes
// 这样确保接收到的数据存储在正确的位置,与其他 chunks 形成连续的内存布局
// GEMM 计算:使用当前可用的 B chunk 进行矩阵乘法
// 获取输入和输出的 tensor chunks,这些 chunks 指向 _ubuf 缓冲区中的相应位置
auto input_b_chunk =
get_buffer_chunk_like(B, input_b_chunk_size * send_chunk_id, input_b_chunk_shape);
// 获取 B 的 1X chunk:从 B 的起始位置偏移 input_b_chunk_size * send_chunk_id
// 在 Ring exchange 过程中,_ubuf 缓冲区逐步收集所有 chunks,所以可以直接使用 send_chunk_id 作为索引
auto output_chunk =
get_tensor_chunk(D, output_chunk_size * send_chunk_id, output_chunk_shape);
// 获取 D 的 1X chunk:从 D 的起始位置偏移 output_chunk_size * send_chunk_id
// D 的输出也按照 chunk_id 顺序存储,与 B 的布局一致
auto aux_chunk =
(do_gelu)
? get_tensor_chunk(pre_gelu_out, output_chunk_size * send_chunk_id, {n_chunk, k})
: TensorWrapper(nullptr, std::vector<size_t>{0}, pre_gelu_out.dtype());
// 如果需要 GELU 激活,获取 pre_gelu_out 的 1X chunk(用于保存激活前的输出)
auto workspace_chunk = get_tensor_chunk(
workspace, (i % _stream_compute.size()) * workspace_size_chunk, {workspace_size_chunk});
// 获取工作空间 chunk:根据迭代次数和计算流数量,轮询分配工作空间
// 这样允许多个计算流并行执行,每个流使用不同的工作空间,避免冲突
// ��执行 GEMM 计算(在独立的计算流上,与通信并行)
// 这是流水线的核心:第 i 轮计算 chunk i,同时接收 chunk i+1(流水线重叠)
// 计算和通信完全重叠,最大化 GPU 利用率
nvte_cublas_gemm(A.data(), input_b_chunk.data(), output_chunk.data(), bias.data(),
aux_chunk.data(), transa, transb, grad, workspace_chunk.data(), accumulate,
use_split_accumulator, _math_sms,
_stream_compute[i % _stream_compute.size()]);
// 参数说明:
// A: 输入矩阵 A(所有 ranks 共享,不需要通信)
// input_b_chunk: B 的 1X chunk(从 _ubuf 缓冲区中获取,已通过 Ring exchange 收集)
// output_chunk: D 的 1X chunk(输出结果)
// bias: 偏置向量(可选)
// aux_chunk: GELU 激活前的输出(可选)
// transa, transb: 转置标志
// grad: 是否为反向传播
// workspace_chunk: 工作空间
// accumulate: 是否累加到输出
// use_split_accumulator: 是否使用分块累加器(提高数值精度)
// _math_sms: 用于 GEMM 的 SM 数量(排除通信使用的 SM)
// _stream_compute[i % _stream_compute.size()]: 使用的计算流(轮询分配)
// Ring 通信(如果不是最后一步):发送当前 chunk 到下一个 rank,从上一个 rank 接收下一个要计算的 chunk
if (i < _tp_size - 1) {
userbuffers_send(_ub_reg, send_offset, _ub_reg, send_offset, comm_bytes, _ub_comm,
_next_rank, _stream_send[0]);
// 发送当前 chunk 到 Ring 拓扑中的下一个节点
// 参数说明:
// _ub_reg: userbuffer 注册 ID
// send_offset: 发送数据的源偏移量(在本地 _ubuf 中的位置)
// _ub_reg, send_offset: 发送数据的目标偏移量(在远程 rank 的 _ubuf 中的位置,使用相同偏移量确保连续布局)
// comm_bytes: 发送的字节数(1X chunk 的大小)
// _next_rank: 目标 rank(Ring 拓扑中的下一个节点)
// _stream_send[0]: 使用的发送流
userbuffers_recv(_ub_reg, recv_offset, _ub_reg, recv_offset, comm_bytes, _ub_comm,
_prev_rank, _stream_recv);
// 从 Ring 拓扑中的上一个节点接收下一个要计算的 chunk
// 参数说明:
// recv_offset: 接收数据的目标偏移量(在本地 _ubuf 中的位置)
// _prev_rank: 源 rank(Ring 拓扑中的上一个节点)
// _stream_recv: 使用的接收流
// 接收到的数据存储在 recv_offset 位置,确保与其他 chunks 形成连续的内存布局
// 记录接收完成事件
NVTE_CHECK_CUDA(cudaEventRecord(_stop_recv, _stream_recv));
NVTE_CHECK_CUDA(cudaStreamWaitEvent(_stream_send[0], _stop_recv, 0)); // 发送流等待接收完成
// 确保缓冲区可用,避免数据竞争
// 这是流水线的关键:通过 Event 同步而非阻塞式同步,允许不同流并行执行
NVTE_CHECK_CUDA(
cudaStreamWaitEvent(_stream_compute[(i + 1) % _stream_compute.size()], _stop_recv, 0)); // 下一个计算流等待接收完成
// 确保输入数据已就绪,才能开始下一次 GEMM 计算
// 这样实现计算和通信的流水线重叠:第 i 轮计算时,第 i+1 轮的数据正在接收
}
}
}
// ===== 第五部分:结果复制和同步 =====
// 如果需要保存 AllGather 后的 B(用于反向传播),则复制到 B_copy
// 在反向传播时,需要完整的 B 矩阵来计算梯度,所以需要将 AllGather 后的 B 保存到 B_copy
if (B_copy.numel() > 0) {
NVTE_CHECK_CUDA(cudaMemcpyAsync(B_copy.dptr(), _ubuf.dptr(), _ubuf.bytes(),
cudaMemcpyDeviceToDevice, _stream_send[0]));
// 从 _ubuf 复制到 B_copy:_ubuf 存储了 AllGather 后的完整 B 矩阵
// 使用异步复制,在发送流上执行(因为发送流此时可能已经空闲)
}
// 恢复原始 SM 设置,避免影响后续操作
_ub_comm->sms = ori_sms;
// 等待所有计算流完成:使用 Event 同步而非 stream synchronization,减少阻塞
// 这是性能优化的关键:Event 同步允许其他操作继续执行,而 stream synchronization 会阻塞整个线程
for (size_t i = 0; i < _stream_compute.size(); i++) {
NVTE_CHECK_CUDA(cudaEventRecord(_stop_compute, _stream_compute[i])); // 记录每个计算流的完成事件
NVTE_CHECK_CUDA(cudaStreamWaitEvent(stream_main, _stop_compute, 0)); // 主流等待计算流完成
// 这样确保所有 GEMM 计算都完成后,函数才返回
}
// 等待发送流完成
NVTE_CHECK_CUDA(cudaEventRecord(_stop_send, _stream_send[0])); // 记录发送流的完成事件
NVTE_CHECK_CUDA(cudaStreamWaitEvent(stream_main, _stop_send, 0)); // 主流等待发送流完成
// 确保所有数据都已发送完成
// 等待接收流完成
NVTE_CHECK_CUDA(cudaEventRecord(_stop_recv, _stream_recv)); // 记录接收流的完成事件
NVTE_CHECK_CUDA(cudaStreamWaitEvent(stream_main, _stop_recv, 0)); // 主流等待接收流完成
// 确保所有数据都已接收完成
// 最终确保��所有流(计算、发送、接收)都完成后再返回,保证数据一致性
} // CommOverlapP2PBase::split_overlap_ag
reduce_scatter(CommOverlapP2PBase::split_overlap_rs函数)
实际代码(P2P实现)
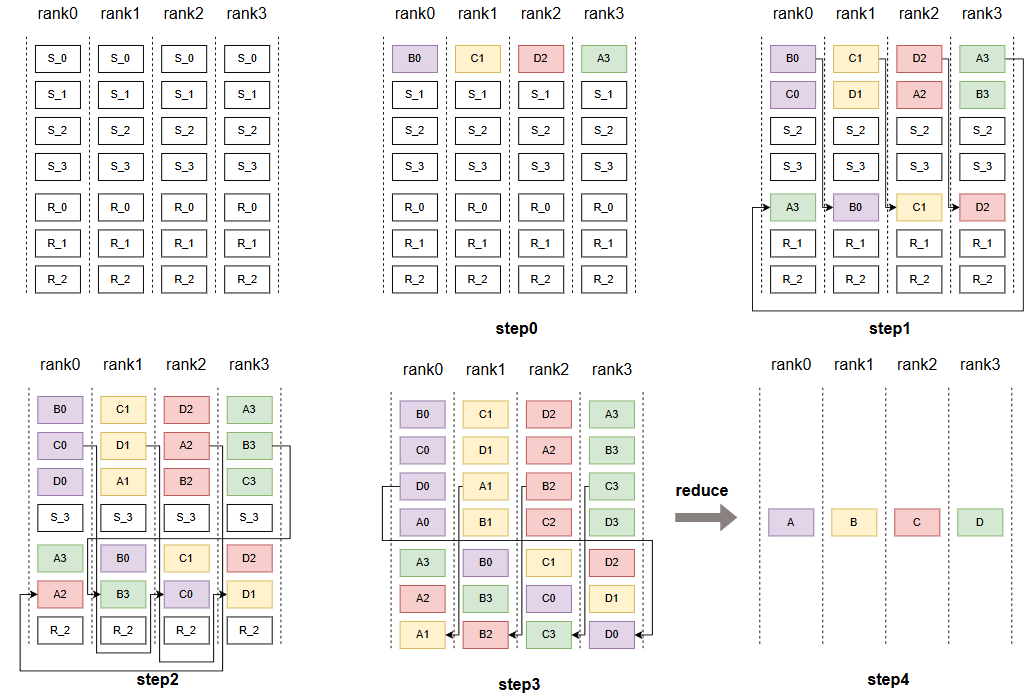
我们可以先看最原始的非overlap的图,在计算时,我们在多个tp_rank上会分别计算出一个大小相同但是是partial状态的输出,那么此时我们需要对它们做reduce,得到全局的输出,而又因为每张卡并不需要完整的全局输出,只需要自己负责的那一块数据,因此这里采用的是reduce_scatter,即使用ring结构,每个rank将接收的数据拼接自己已有的数据发送出去到下一个连续的rank上(首次发送rank_id块数据)。从而实现reduce_scatter。那么我们其实可以发现,既然每个rank并不需要全局的输出,是否我们可以先计算其它rank需要的那一块数据,发送给它,再发送的同时,再计算下一个rank需要的数据。(即对于n个rank来说,它需要发送(n-1)块数据给(n-1)个rank。)所以注意这里其实是P2P通信,不再是ring的通信
所以,4卡的reduce_scatter的overlap如图所示,每张卡会有4个发送缓冲区和3个接收缓冲区,为了实现显存的统一化管�理减少内存碎片,这里7个缓冲区块放在一个连续的内存上。发送缓冲区块用于存放第i-1步计算出来的数据,而接收缓冲区用来存放第i步通信接收到的数据。
第0步,由于没有上一步计算的数据,因此不做通信
```cpp
/*
* 函数名: CommOverlapP2PBase::split_overlap_rs
* 功能: 使用 P2P(点对点)通信方式实现 ReduceScatter + GEMM 重叠计算
*
* 参数说明:
* - A: 输入矩阵 A
* - transa: A 是否转置
* - B: 输入矩阵 B(已按 TP 分片)
* - transb: B 是否转置
* - D: GEMM 输出矩阵(同时也是通信缓冲区)
* - bias: 偏置向量(可选)
* - pre_gelu_out: GELU 前输出(可选,用于某些激活函数)
* - workspace: GEMM 工作空间
* - grad: 是否为梯度计算
* - accumulate: 是否累加到输出
* - use_split_accumulator: 是否使用分片累加器
* - rs_output: ReduceScatter 最终输出
* - stream_main: 主 CUDA 流
*/
void CommOverlapP2PBase::split_overlap_rs(
const TensorWrapper &A, bool transa,
const TensorWrapper &B, bool transb, TensorWrapper &D,
TensorWrapper &bias, TensorWrapper &pre_gelu_out,
TensorWrapper &workspace, bool grad, bool accumulate,
bool use_split_accumulator, TensorWrapper &rs_output,
cudaStream_t stream_main) {
// ========== 第一部分:保存并配置通信器参数 ==========
// 保存原始 SM(流式多处理器)数量,以便后续恢复
int ori_sms = _ub_comm->sms;
// 配置通信器参数
_ub_comm->use_ce = _use_ce; // 是否使用 CUDA Events
_ub_comm->sms = _num_comm_sm; // 为通信分配 SM 数量
_ub_comm->cga_size = _cga_size; // CGA(Cooperative Group Array)大小
// ========== 第二部分:计算 GEMM 和通信的维度信息 ==========
// 根据转置标志计算矩阵维度
// m: 输出矩阵的行数(或列数,取决于转置)
// k: 输入矩阵的共享维度
size_t m = transa ? A.size(0) : A.size(1);
size_t k = transa ? A.size(1) : A.size(0);
// n_chunk: 每个 TP rank 处理的 B 矩阵 chunk 大小
// 在 TP 模式下,B 矩阵被分成 _tp_size 个 chunk,每个 rank 处理一个
size_t n_chunk = _ubufs[0].size(0);
// comm_bytes: 每次通信传输的字节数(一个 chunk 的大小)
const int comm_bytes = _ubufs[0].bytes();
// 计算各种 chunk 的大小
size_t input_chunk_size = n_chunk * k; // B 矩阵每个 chunk 的元素数
size_t output_chunk_size = n_chunk * m; // GEMM 输出每个 chunk 的元素数
size_t workspace_size_chunk = workspace.numel() / _stream_compute.size(); // 工作空间每个 chunk 大小
// ========== 第三部分:同步主流和计算/通信流 ==========
// 在主流上记录一个事件,确保所有后续操作都在主流的当前状态之后执行
NVTE_CHECK_CUDA(cudaEventRecord(_start_compute, stream_main));
// 让所有发送流等待主流的同步点
for (size_t i = 0; i < _stream_send.size(); i++) {
NVTE_CHECK_CUDA(cudaStreamWaitEvent(_stream_send[i], _start_compute, 0));
}
// 让接收流等待主流的同步点
NVTE_CHECK_CUDA(cudaStreamWaitEvent(_stream_recv, _start_compute, 0));
// 让所有计算流等待主流的同步点
for (size_t i = 0; i < _stream_compute.size(); i++) {
NVTE_CHECK_CUDA(cudaStreamWaitEvent(_stream_compute[i], _start_compute, 0));
}
// ========== 第四部分:流水线执行 GEMM 和 P2P 通信 ==========
// 循环处理 _tp_size 个 chunk
// 每个 rank 需要计算所有其他 rank 的 B chunk 与 A 的 GEMM 结果
for (int i = 0; i < _tp_size; i++) {
// --- 4.1 准备 GEMM 计算 ---
// stream_id: 选择使用哪个计算流(轮询使用多个流以实现更好的并行度)
int stream_id = i % _stream_compute.size();
// input_b_chunk_id: 计算当前需要处理的 B chunk 的 ID
// 公式: (_tp_id + i + 1) % _tp_size
// 解释:
// - _tp_id 是当前 rank 在 TP group 中的 ID (0 到 _tp_size-1)
// - +1 是因为第一个 chunk (i=0) 使用当前 rank 自己的 B chunk
// - 后续 chunk 依次使用下一个 rank 的 B chunk(通过 ring exchange 获得)
// - % _tp_size 确保索引在有效范围内
int input_b_chunk_id = (_tp_id + i + 1) % _tp_size;
// 获取对应的 B chunk 和输出 chunk
auto input_b_chunk = get_tensor_chunk(B, input_b_chunk_id * input_chunk_size, {n_chunk, k});
// 【关键】output_chunk 的数据指针被重定向到 _ubufs[i] 缓冲区
// get_buffer_chunk_by_id 函数会:
// 1. 先创建一个基于 D tensor 的 chunk(保留 D 的元数据,如 scale、dtype 等)
// 2. 然后通过 set_rowwise_data(_ubufs[i].dptr(), ...) 将数据指针重定向到 _ubufs[i]
// 3. 这样,output_chunk.data() 返回的指针就指向 _ubufs[i] 缓冲区
// 4. GEMM 计算时,结果会**直接写入** _ubufs[i] 缓冲区,无需额外拷贝(零拷贝设计)
auto output_chunk = get_buffer_chunk_by_id(D, i); // 输出存储在 _ubufs[i] 中
// 获取对应的工作空间 chunk
auto workspace_chunk =
get_tensor_chunk(workspace, stream_id * workspace_size_chunk, {workspace_size_chunk});
// --- 4.2 执行 GEMM 计算 ---
// 计算: A * B[input_b_chunk_id] + bias
// **关键**:结果直接写入 output_chunk.data() 指向的内存,即 _ubufs[i] 缓冲区
// 这是通过 get_buffer_chunk_by_id 函数实现的指针重定向,实现了零拷贝
nvte_cublas_gemm(A.data(), input_b_chunk.data(), output_chunk.data(), bias.data(),
pre_gelu_out.data(), transa, transb, grad, workspace_chunk.data(), accumulate,
use_split_accumulator, _math_sms, _stream_compute[stream_id]);
// --- 4.3 P2P 通信(从第二个迭代开始,i > 0)---
// 第一次迭代 (i=0) 不需要通信,因为此时还没有计算好的结果可以发送
// 第一次迭代计算完成后,结果存储在 _ubufs[0] 中
// 第二次迭代 (i=1) 时,才会发送第一次迭代的结果(i-1=0 的结果)
if (i > 0) {
// 选择上一个 chunk 使用的计算流
int prev_stream_id = (i - 1) % _stream_compute.size();
// 计算通信的偏移量
// send_offset: 发送数据的起始位置(前一次迭代 i-1 的计算结果)
// 例如:i=1 时,发送 i-1=0 的结果,即 _ubufs[0] 的内容
int send_offset = comm_bytes * (i - 1);
// recv_offset: 接收数据的起始位置(下一个 chunk 需要的数据)
// 注意: recv_offset 在 _ubufs 的后半部分(索引 _tp_size 到 2*_tp_size-1)
int recv_offset = comm_bytes * (i - 1 + _tp_size);
// 计算通信的目标 rank
// send_rank: 接收当前 rank 发送数据的 rank
// 公式: (_tp_id + i) % _tp_size + _rank_round_tp
// 解释:
// - (_tp_id + i) % _tp_size: 在 TP group 内的相对 rank
// - + _rank_round_tp: 加上 TP group 的起始 rank(支持数据并行)
// 例如: 如果 _tp_id=1, i=2, _tp_size=4, _rank_round_tp=0
// send_rank = (1+2)%4 + 0 = 3
// 表示 rank 1 发送数据给 rank 3
int send_rank = (_tp_id + i) % _tp_size + _rank_round_tp;
// recv_rank: 从哪个 rank 接收数据
// 公式: (_tp_size + _tp_id - i) % _tp_size + _rank_round_tp
// 解释: 使用模运算确保索引正确,支持反向 ring
// 例如: 如果 _tp_id=1, i=2, _tp_size=4, _rank_round_tp=0
// recv_rank = (4+1-2)%4 + 0 = 3
// 表示 rank 1 从 rank 3 接收数据
int recv_rank = (_tp_size + _tp_id - i) % _tp_size + _rank_round_tp;
// 等待上一个 chunk 的 GEMM 计算完成
NVTE_CHECK_CUDA(cudaEventRecord(_start_comm, _stream_compute[prev_stream_id]));
NVTE_CHECK_CUDA(cudaStreamWaitEvent(_stream_send[prev_stream_id], _start_comm, 0));
NVTE_CHECK_CUDA(cudaStreamWaitEvent(_stream_recv, _start_comm, 0));
// 执行 P2P 通信
//
// 【重要】为什么 userbuffers_send 需要 recv_offset 参数?
//
// userbuffers_send 函数签名:
// userbuffers_send(srchandler, srcoffset, dsthandler, dstoffset, bytes, comm, peer, stream)
// 参数说明:
// - srchandler: 源缓冲区 handler(发送方的缓冲区)
// - srcoffset: 源缓冲区偏移(发送方从哪个位置读取数据)
// - dsthandler: 目标缓冲区 handler(接收方的缓冲区)
// - dstoffset: 目标缓冲区偏移(接收方将数据放在哪个位置)**这就是 recv_offset**
// - bytes: 传输的字节数
// - comm: 通信器
// - peer: 目标 rank
// - stream: CUDA 流
//
// recv_offset 的作用:
// - 告诉接收方(send_rank)数据应该放在它的缓冲区的哪个位置
// - 在 userbuffers_send 的实现中,会计算目标 rank 的缓冲区地址:
// dstptr = comm->peer_ptr[dsthandler][peerlocal] + dstoffset
// - 这样发送方就知道应该将数据写入接收方缓冲区的哪个偏移位置
//
// 为什么需要这个参数?
// - 在 P2P 通信中,发送方需要知道接收方的缓冲区布局
// - 接收方可能有多个缓冲区区域,需要指定数据放在哪里
// - 在这个场景中,recv_offset = comm_bytes * (i - 1 + _tp_size)
// 表示数据应该放在接收方的接收缓冲区区域(_ubufs[_tp_size] 之后)
//
// 发送: 将前一次迭代 (i-1) 的计算结果发送给 send_rank
// - 从发送方的 send_offset 位置读取数据
// - 写入接收方的 recv_offset 位置
userbuffers_send(_ub_reg, send_offset, _ub_reg, recv_offset, comm_bytes, _ub_comm, send_rank,
_stream_send[prev_stream_id]);
// 接收: 从 recv_rank 接收数据(用于后续迭代或 reduce)
// - 从 recv_rank 的 send_offset 位置读取数据
// - 写入本地的 recv_offset 位置
userbuffers_recv(_ub_reg, send_offset, _ub_reg, recv_offset, comm_bytes, _ub_comm, recv_rank,
_stream_recv);
}
}
// ========== 第五部分:同步所有流到主流 ==========
// 等待所有计算流完成
for (size_t i = 0; i < _stream_compute.size(); i++) {
NVTE_CHECK_CUDA(cudaEventRecord(_stop_compute, _stream_compute[i]));
NVTE_CHECK_CUDA(cudaStreamWaitEvent(stream_main, _stop_compute, 0));
}
// 等待所有发送流完成
for (size_t i = 0; i < _stream_compute.size(); i++) {
NVTE_CHECK_CUDA(cudaEventRecord(_stop_send, _stream_send[i]));
NVTE_CHECK_CUDA(cudaStreamWaitEvent(stream_main, _stop_send, 0));
}
// 等待接收流完成
NVTE_CHECK_CUDA(cudaEventRecord(_stop_recv, _stream_recv));
NVTE_CHECK_CUDA(cudaStreamWaitEvent(stream_main, _stop_recv, 0));
// ========== 第六部分:Reduce 所有 chunk 的结果 ==========
//
// 【重要】Reduce 范围是如何指定的?
//
// reduce 函数通过以下参数指定 reduce 的范围:
// 1. inputs 指针:指向输入缓冲区的起始位置(这里是 _ubufs[_tp_size - 1])
// 2. num_inputs:要 reduce 的缓冲区数量(_tp_size)
// 3. input_size:每个缓冲区的大小(_ubufs[0].numel())
//
// 为什么从 _ubufs[_tp_size - 1] 开始?
// - 在通信过程中,_ubufs[0] 到 _ubufs[_tp_size-2] 都被发送出去了
// - 只有 _ubufs[_tp_size-1] 没有被发送出去,它保留的是"自己的"计算结果
// - 这个缓冲区不需要发送,因为它是最后一个迭代的结果
//
// 关键理解:
// - reduce 函数从 inputs 指针开始,**向后**(向高地址)读取 num_inputs 个缓冲区
// - 函数实现:loader.load(tid + num_aligned_elements_per_input * input_id, tot_input_size)
// - 这意味着从 inputs + input_id * input_size 位置读取数据
// - 如果 inputs = _ubufs[_tp_size-1],那么会读取:
// * input_id=0: _ubufs[_tp_size-1] (自己的结果,不需要发送)
// * input_id=1: _ubufs[_tp_size] (接收缓冲区,包含从其他 rank 接收的数据)
// * input_id=2: _ubufs[_tp_size+1] (接收缓冲区)
// * ...
// * input_id=_tp_size-1: _ubufs[2*_tp_size-2] (最后一个接收缓冲区)
//
// 但是,接收缓冲区里存储的是什么数据?
// - 在通信过程中,每个 rank 发送自己的 GEMM 结果给其他 rank
// - 接收缓冲区可能存储的是从其他 rank 接收到的、需要 reduce 的数据
// - 或者,数据在通信过程中被重新排列,使得接收缓冲区包含了需要 reduce 的数据
//
// 实际上,更可能的情况是:
// - reduce 函数需要 reduce 所有 _tp_size 个 chunk 的结果
// - 每个 rank 计算了不同的 chunk,这些结果分布在不同的 rank 上
// - 通过通信,每个 rank 收集到了所有 chunk 的结果(部分在自己的缓冲区,部分在接收缓冲区)
// - reduce 函数从 _ubufs[_tp_size-1] 开始,读取所有需要 reduce 的数据
//
// 注意:这里的具体数据布局可能需要查看通信的具体实现来确认
char *reduce_buf_ptr = reinterpret_cast<char *>(_ubufs[_tp_size - 1].dptr());
char *rs_output_ptr = reinterpret_cast<char *>(rs_output.dptr());
// 根据数据类型选择 reduce 函数
if (_ubuf.element_size() == 1 && rs_output.element_size() == 2) {
// FP8 输入,BF16 输出:需要类型转换和 scale 处理
// 函数签名:reduce_fp8_in_bf16_out(void *inputs, void *output, float *scale,
// int num_inputs, int input_size, ...)
// - inputs: 指向连续内存区域的指针,包含 num_inputs 个 FP8 缓冲区
// - output: 输出 BF16 缓冲区
// - num_inputs: _tp_size(要 reduce 的缓冲区数量)
// - input_size: _ubufs[0].numel()(每个缓冲区的大小)
char *rs_output_ptr = reinterpret_cast<char *>(rs_output.dptr());
TRANSFORMER_ENGINE_TYPE_SWITCH_FP8ONLY(
D.dtype(), fp8_type,
reduce_fp8_in_bf16_out<fp8_type>(reduce_buf_ptr, rs_output_ptr, D.scale_inv(), _tp_size,
_ubufs[0].numel(), stream_main););
} else {
// BF16 输入输出:直接 reduce
// 函数签名:reduce_bf16(void *inputs, void *output, int num_inputs, int input_size, ...)
// - inputs: 指向连续内存区域的指针,包含 num_inputs 个 BF16 缓冲区
// - output: 输出 BF16 缓冲区
// - num_inputs: _tp_size(要 reduce 的缓冲区数量)
// - input_size: _ubufs[0].numel()(每个缓冲区的大小)
//
// 在 CUDA kernel 中的实现逻辑:
// for (input_id = 0; input_id < num_inputs; ++input_id) {
// 从 inputs + input_id * input_size 位置读取数据
// 累加到 accum_buf
// }
// 将累加结果写入 output
reduce_bf16(reduce_buf_ptr, rs_output_ptr, _tp_size, _ubufs[0].numel(), stream_main);
}
// ========== 第七部分:恢复通信器参数 ==========
_ub_comm->sms = ori_sms;
}
```
backward中的overlap(bulk overlap)
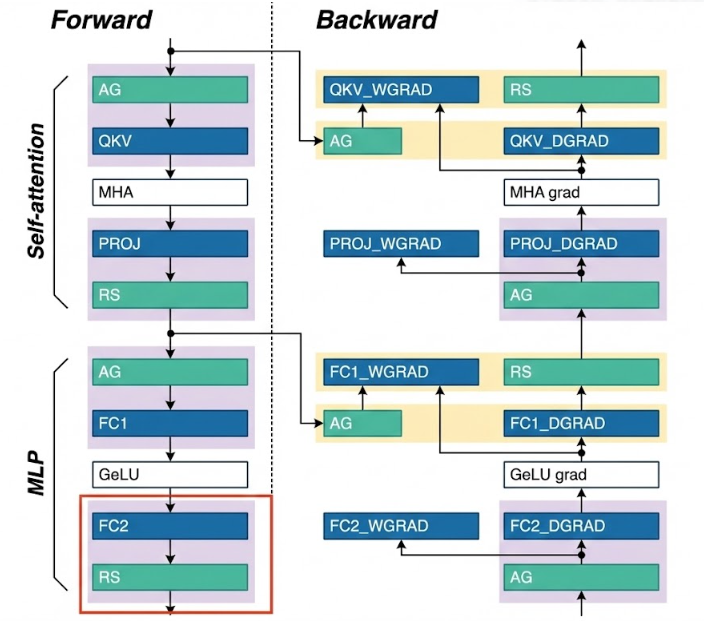
如图所示,在backward 的时候,黄色框中对应的部分也会做overlap——因为在forward的时候,每个rank经过Reduce_Scatter后,只保存了部分输出,而我们在计算FC1_WGRAD时,需要这一层的完整输入(因为forward是做了AG,将输入完整拼接起来,进一步做的MLP层的计算,因此此时计算FC1_WGRAD也需要做AG获得完整激活值),而又因为计算FC1_DGRAD(即当前层输入的梯度)时,只需要当前层的weight和上一层传下来的梯度,并不需要完整的输入数据,因此此时的AG和FC1_DGRAD天然可以做并行。
3.5 上下文并行(CP)
目前提到比较多的是Colossal-AI的Ring Attention以及DeepSpeed的Ulysses。以及Megatron的cp(增强版的sp)。
Ulysess:切分Q、K、V序列维度,核心卖点保持通信复杂度低,和GPU数无关,和序列长度呈线性关系。
Ring-Attention:切分Q、K、V序列维度,核心卖点是通信和计算重叠。
DeepSpeed的Ulysses
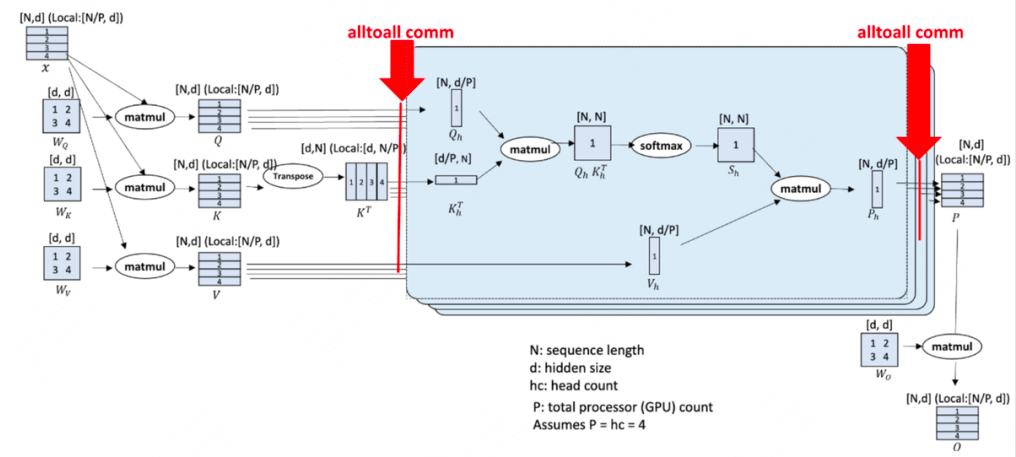
这个思想主要是将输入X在Sequence维度进行切分,切分后,此时Sequence维度是N/P,其中N表示序列长度,P表示Rank个数,而d表示hidden_dim。由于每个Rank上都保留了完整的d维度,因此可以直接和大矩阵WQ,WK,WV相乘,分别得到大小为(N/P,d)大小的分块Q,K,V,然而计算attention时,是需要Sequence维度保持一个完整状态,因为存在token之间的关联,所以这里使用一个alltoall的通信操作来把切分转到下一个维度,如果是attention就会转到头维度。如下图给了详细的解释:
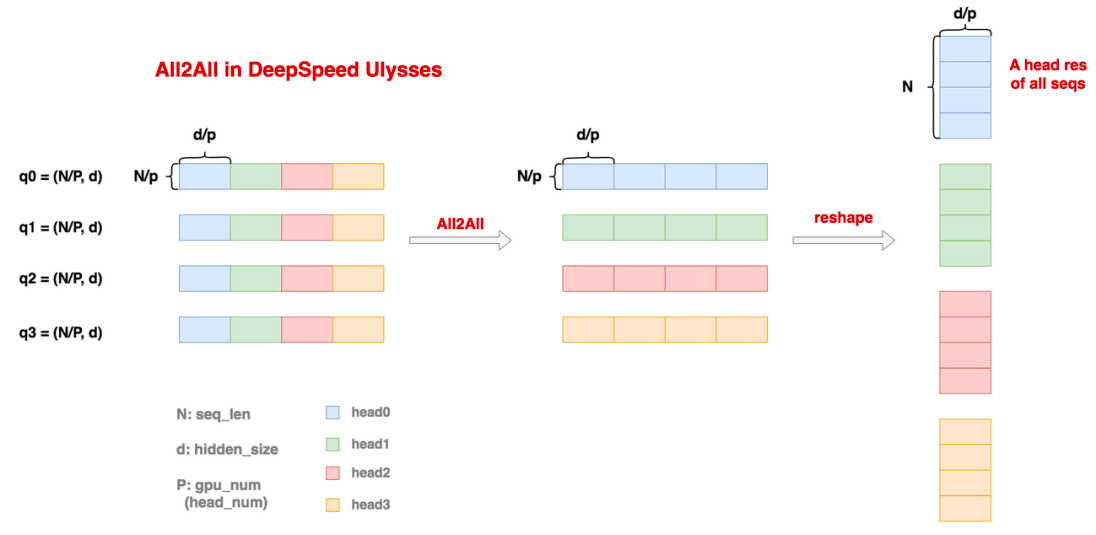
这里首先展示了4个rank上保存的输入,此时每个rank保存了完整的头维度,和N/P大小的sequence维度,当使用all2all时,每个rank根据自身rank号保留自己的那一块数据,然后把其它块分别发送给对应块号的rank,这样,此时每个rank都保存了完整的N个token的信息,做一个reshape操作,即可看到,每个rank的sequence是完整的,而头维度被切成了P分。所以这里其实还需要满足head_num是P的整数倍,每张卡其实是算1个/若干个head的结果,与TP非常相似。
所以这里也有一个重点,如果采用GQA,则不能用ulysses,因为此时KV head只有一对,无法切分,而上述方法是要对Q,K,V都做均匀切分。
Attention计算结束后,最后的输出score形状仍然是(N,d/p),接下来,所有的rank再1次alltoall,注意这时候只有一个输出,所以是一次,而在输出的时候,因为Q,K,V分别有一份,所以输入是3次alltoall。最终每张卡上都恢复成(N/p,d)的形状,再和Wo矩阵相乘,得到(N/p,d)的结果。接着进入MLP层,由于MLP层本身就不涉及到token间的相关性计算,因此每个seq_chunk都可以独自计算。重复上述操作,直到计算到Loss为止。注意这里和Megatron中的TP+SP不一样,只需要在attention前后通信。因为每个rank最后loss都是部分数据算出来,所以应该还有梯度同步的过程,不过梯度同步的通信量可以和梯度计算过程overlap。
Megatron的TP+SP与Deepspeed的ulysses通信量对比分析:
Megatron的TP+SP包括forward和backward过程共4次(allgather+reducescatter),也是8次,一次allgather的通信量大概是Nd,reducescatter也是如此,所以是8Nd。
ulysses的通信包括forward过程的4次alltoall,反向也如此。所以一共8次alltoall单卡的通讯量为(8Nd)/P,这也意味着,当N变大时,如果可以同倍数增加gpu的数量,那么就可以让单卡通讯两维持一个不变的数,不过要注意,这里的P的数量会被head_num限制住。
Colossal-AI的Ring Attention
可以看到Ring Attention其实和FA V2很相似,都是在Sequence_lenth维度上做切分,但FA V2只在Q的Sequence_lenth维度做了切分,而Ring Attention做了进一步的切分,因为通过阅读FA V2的算法可以发现,其实每次用Q和KV计算得出来的其实是一个partial状态,最终就是在上一个partial状态的去更新计算下一个partial状态,每次只需要当前的max和sum的信息即可,逐步得到完整O的分块。而这个计算中,每个partial状态的顺序并不是严格,并且每个rank上都保存完整的K,V块,非常浪费显存。
基于此Ring Attention应运而生,它把Q,K,V都在Sequence_lenth维度做了切分,在实际计算时,通过ring的操作,每次计算完后,环形交换K,V对,这样经过(rank-1)轮循环后,所有rank上的O的那部分块都能完整更新。
最佳分块大小Chunk_size分析
假设硬件的算力上限是F:F表示这个硬件每秒最多能完成的浮点运算次数,单位是FLOP/S。
假设硬件的带宽上限是B:表示这个硬件每秒最多能完成的内存交换量,单位是Byte/s。
那么在单卡上对某个QKV chuck计算attention有,,所以attention score的计算量为FLOPs(乘法+加法),而,所以计算量为。
而假设用bf16/fp16进行训练,则传输的KV数据量大小(单位bytes)为:
K chunk 大小为2dc bytes ,V chunk 大小为 2dC bytes
所以传输KC的数据量大小为4dC bytes
因为传输时间要小于计算时间,才能够把传输时间��给覆盖掉,则有:
转化后有:
这里还没有计算Q,K,V的计算时间,所以这个C是非常严格的,我们可以根据硬件的算力F和带宽上限B来得到最佳Chunk_size。
Ring Attention存在的问题
1.负载不均衡
我们可以假设我们用的是casual mask,那么这就意味着,每个token只关心和它和自己以及它之前的token的attention,而此时传统的ring attention设计是每个分块Q都会和所有的KV块做计算,这就会导致前面的一些Q块和KV块的计算完全是浪费的,实际也不会计算因为不需要,就会导致gpu空转,浪费资源。
2.与FA V2更新不同
前面介绍过FA V2在更新O的时候,是每次并不得到最终的softmax_lse,即只在最后和所有KV块计算的结果累积之后,再除以一个总的sum_l,来计算得到最终的输出O。
而ring attention为了保留每次计算后更高的精度,选择了每次计算出一个临时的全局O,即将除以一个总的sum_l,放在循环里面,每次计算得到当前的最大m和当前l的sum,并用这两个值得到一个最终的O,这样可以较大程度上保留更高的数值精度。
Megatron的cp
Megatron主要是在Ring Attention的基础上做了负载均衡:
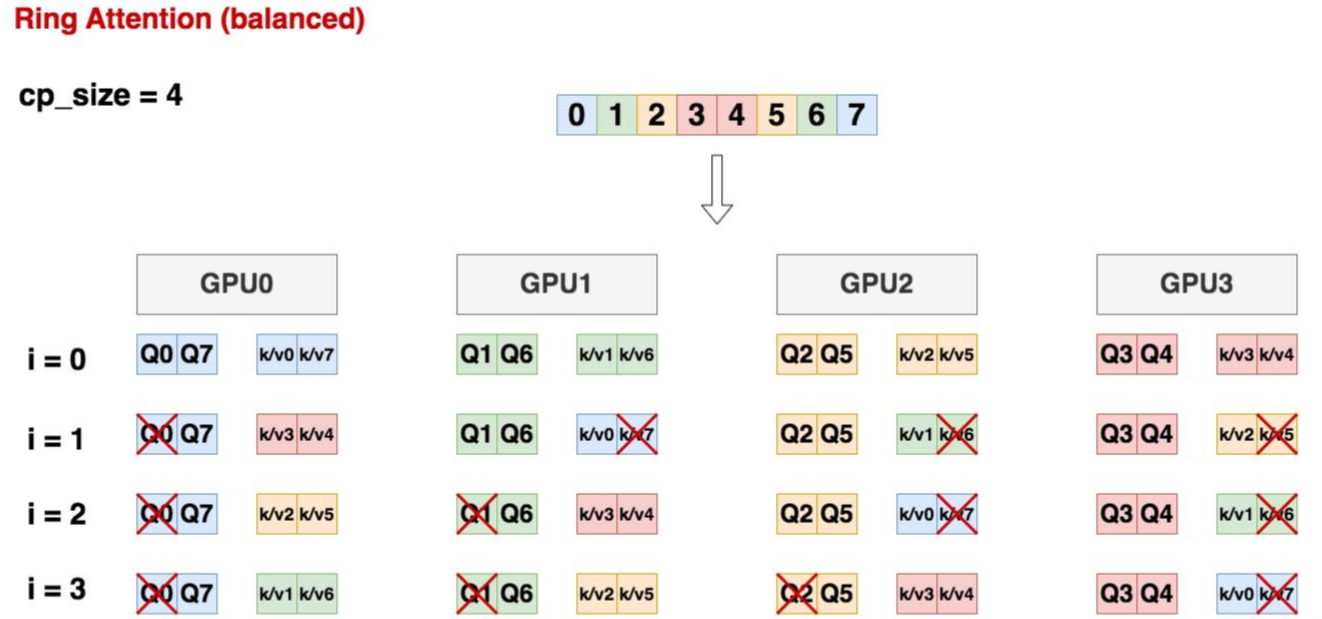
由于每个Q块的计算和KV块的计算并不需要严格按顺序,这个在ring attention中就证明过,这里不再赘述,那么其实可以不按顺序划分整个Q矩阵,而是将Q矩阵,前面��的块后后面的块拼接起来,同样KV块也做一样的操作,这样就可以在计算量上做到负载均衡。
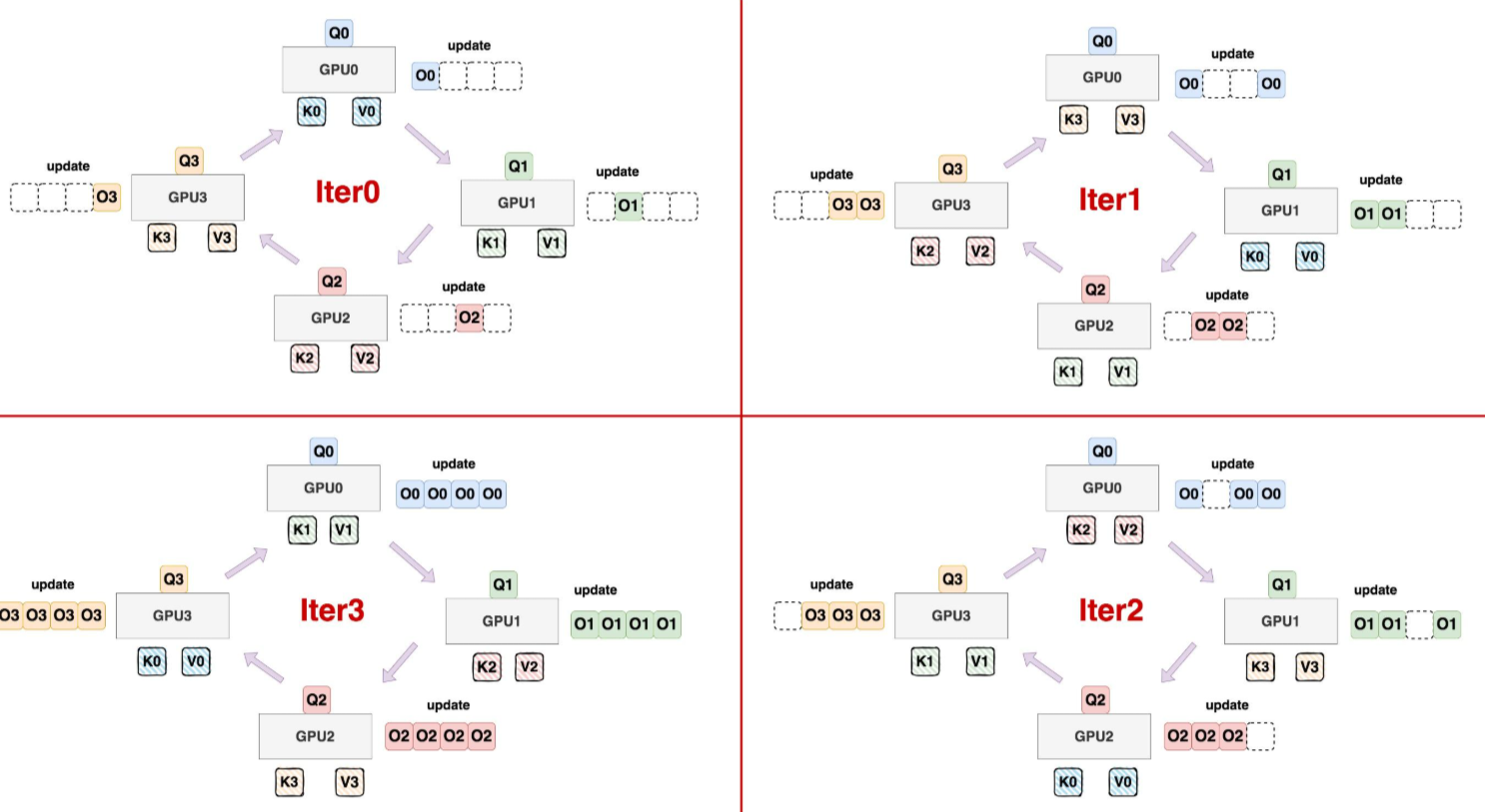
如上图所示,假设cp_size = 4,也就是我们打算在4块gpu上做ring attention。
首先,对于原始输入数据X,我们将其切分为2*cp_size = 8块,也就是上图的0~7 chunk
[0,7],[1, 6],[2, 5], [3, 4]分别组成4个seq_chunk,安放在gpu0~gpu3上。
则在ring attention下,每块gpu上计算cp_size次后,就能得到最终的output。例如对于gpu0,计算4次后,就能得到[0, 7]这两个位置最终的attention结果。
图中接着展示了在不同的iteration中,每块卡上的计算情况,可以发现:
i = 0时,每张卡上都是4个小方块在做attn计算
i = 1/2/3时,每张卡上都是3个小方块在做attn计算
总结来看,每个iteration中,各卡的计算量是相同的。不存在朴素ring attention上某些卡空转的情况。
同时注意到,当i = 1/2/3时,总有Q或者KV块不参与计算,如果我们用rank表示这是cp_group内的第几块gpu(例如rank=0就是上面cp_group中的第0块gpu),则对于某张卡,我们有如下规律:
其中:
用于分配哪张卡上应该维护哪些Q块的代码在:https://github.com/NVIDIA/Megatron-LM/blob/main/megatron/training/utils.py#L233
用于处理实际QKV计算时应该保留哪些数据块,去掉哪些数据块的代码在:https://github.com/NVIDIA/TransformerEngine/blob/main/transformer_engine/pytorch/attention/multi_head_attention.py
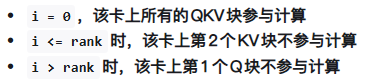
混合并行
注意Megatron的CP和SP是完全不同的两种并行策略,虽然都是沿着Sequence_len维度切分,但是SP是和TP共用,所以它们共用同一组rank,而CP则是完全独立的一组并行策略,和TP使用不同的rank组。
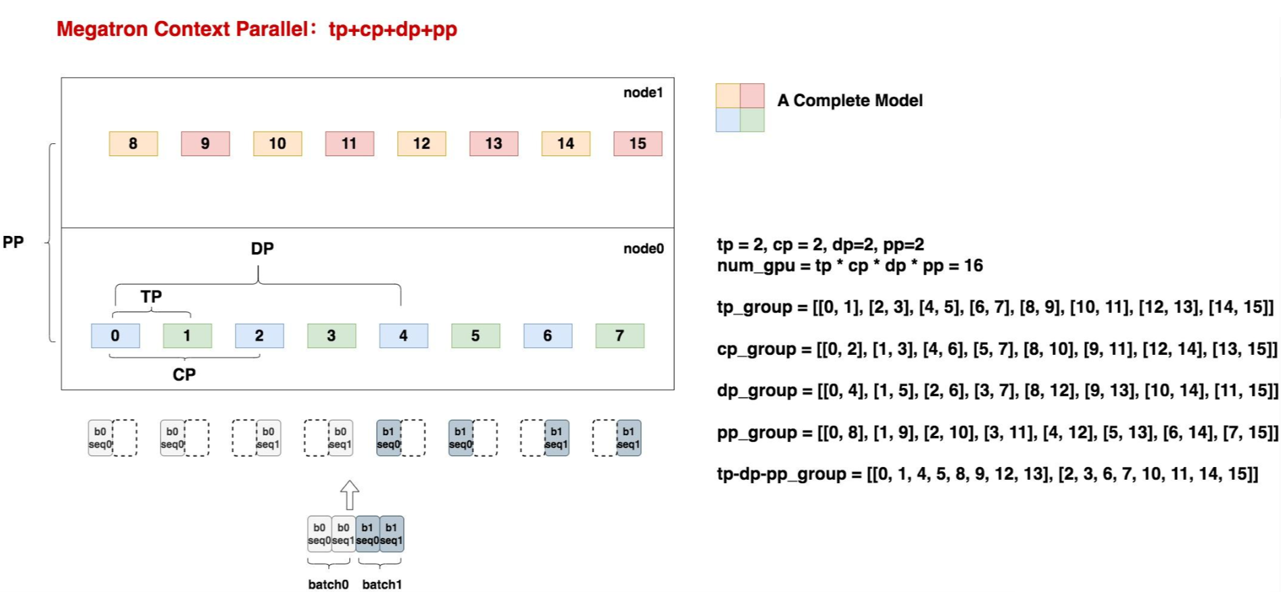
计算和通讯的overlap
在megatron cp中,共包含3个cuda流:
- NCCL stream:定义在cp_group内,是用于做KV发送和接收的cuda流
- **Stream0和Stream1:**都是用于做计算的cuda流,这两个流的作用是可以并行执行attn的计算和softmax_lse的更新。
megatron cp中,除了对计算和通信做并行,同时还对计算中的attention和softmax_lse更新做了并行。这里attention计算指的是FA V2算法中,不对softmax_attention结果除以sum_l的结果 ,而softmax_lse表示利用当前的局部sum_l对结果做修正
可以发现上述的attention和softmax_lse的计算对于同一组QKV来说是串行的,但是对不同组的QKV来说是可以并行的,但是要保证,更新softmax_lse要在下一次计算完最终的Attention之前完成,因为softmax_lse时负责修正,若被新计算的值覆盖,此时就会计算错误。
overlap图
可以看到,cp_size = 4,i表示,即CP每块计算的序号:
1.在初次计算时,即i=1时,不需要更新,因为此时只有一个sum,输出的 无需修正
2.当i=1时,接收到KV时开始计算attention,stram0 赋值lse =lse0,不需要做lse的更新,同时stream1计算当前的attention。
3.当i=2时,stream1更新lse,而stream0则用来计算Attention。
3.6 专家并行(EP)
1.Gshard
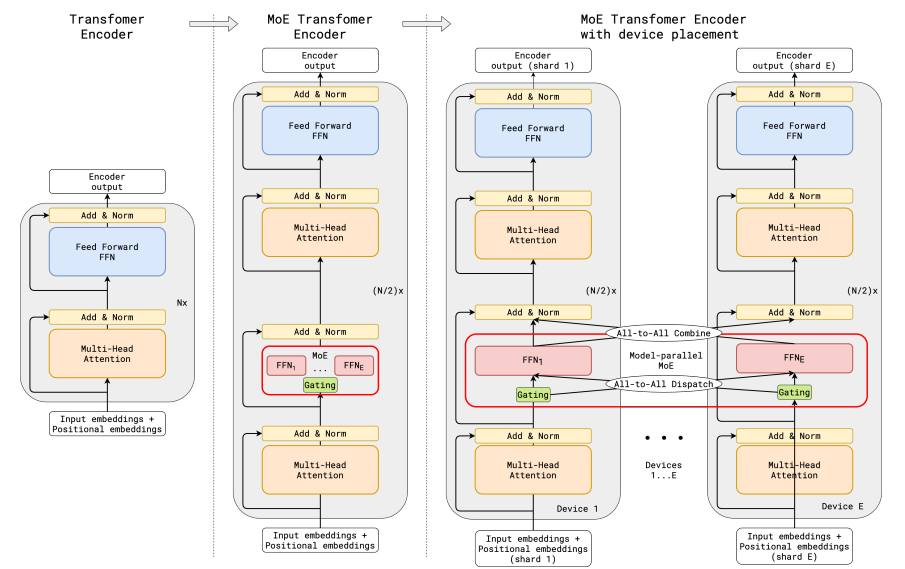
MOE的概念最早由Gshard论文引入,如图就是MOE的核心流程图,分别展示了单卡视角和多卡视角的MOE运作方式。主要的操作就是将原来的FFN的大矩阵,变成多个expert,所有token经过门控网络计算后,计算得出要发送到哪些专家,在Gshard中使用的是TOP2Expert,即每个token选择分数最高的两个专家,每个专家会处理自己分配到的token,并且输出一个结果,最终每个token的结果会根据token分到不同专家的概率和专家的结果做一个加权和,得到该token最终的输出。若在多卡上分配所有专家,则在发送token到不同专家和从不同专家汇总接收token处理后的结果时需要做All-to-All的通信。
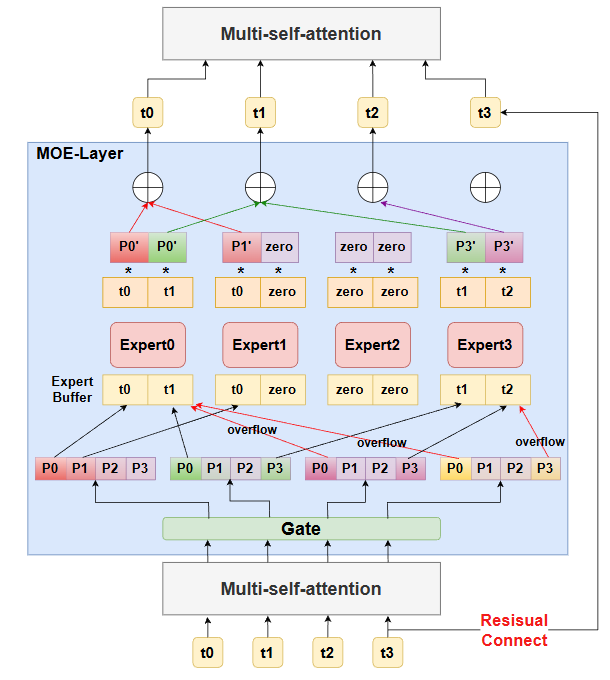
如图为单卡视角下的MOE-Layer的结构,注意MOE的输入为Multi-self-attention的输出,而MOE的输出为Multi-self-attention的输入,expert是从FFN层变换过来的,但是并不意味之是对FFN的均匀切分,expert的大小可以自定义,甚至可以大于原来的FFN,因为此时的expert不再和所有token做全量计算,而是仅仅和部分token做计算,即体现稀疏模型的结构
其中P0'表示token选中的专家的概率,再做归一化后的值,比如对于token0来说选中了expert1和expert2,则
2.输入数据
首先注意所有tokens经过attention层处理后,大小为(batch_size,seq_len,M),其中M为token的embedding维度。在FFN层,我们会把batch_size和seq_len两个维度拍平,即将所有token融合,得到一个S,S即为该batch中所有token的数量,因此此时MOE层输入数据的尺寸为(S,M)。
3.Gate(门控网络)
门控网络也是一个线性层,用来判断每个token应该送往哪个expert,有时也被称为Router(路由)。Gate的尺寸大小为(M,E),其中E表示expert的数量,因此输入数据(S,M)经过处理后,得到prob数据(S,E),即得到每个token对应的所有专家的��权重,Gshard只关心概率最大的两个expert。图中使用最深的颜色表示最大概率的token,而用次深颜色表示第二大概率的token。
门控网络一般使用softmax或者sigmoid(选这个要做归一化),用于计算传入的token相对于每个expert的权重,门控函数满足两个目标:
- **负载均衡:**直接根据softmax的概率分布选择最优秀的k个专家这种方法容易出现负载不均衡现象,即大多数令牌被分配到少部分专家,而其它专家都没有被分配过,即未训练到。
- **规模效率:**在大规模数据(百万级输入)和专家数量(千级专家)下,通过高效的并行设计和资源利用,保持系统整体计算效率和资源利用率的能力。
门控网络中的设计:
1.专家容量:会限制专家处理的令牌数量低于某个阈值,N为训练批次中的总token数,E为专家数,而每个token可以发送给两个专家,则专家容量设置为O(2N/E),当有专家被选中的token数超出阈值时,token会被认为是溢出的(overflow),此时g(S,E),即第E个专家对于第s个token的门控网络输出为零向量,也就是设置为未选中该专家,这些溢出的token会根据残差连接和MOE层的输出结合,输入到下一层。因此可以看出来,最终MOE输出的结果和每一层输入的数据Xs的size是保持一致的(在deepseek-v3开源出来的模型代码中,有用counts记录该批次中所有token分配给专家后,每个专家拥有几个token,但是未使用counts做这样约束)。如图所示,当token选择的expert,仅部分溢出,则只算另一部分未溢出的,而当token选择的expert全部溢出,则token将不做任何处理,直接按照残差链接的方式作为输出。
**2.本地组分发:**将训练批中的所有token均匀分配到G组中的本地组,每组包含S=N/G个token,并行处理,每组每个专家能分配的token数为2N/(G・E),E为每组中的专家数,乘2是因为每个token能分发到两个专家。
**3.辅助损失:**laux,被添加到模型的总损失函数中,![]() ,k为常数因子,为原损失,为辅助损失,其中E为专家数,表示某个专家分配到的token数(一般被token选定为first_expert,即最大概率专家的token的个数),S是当前专家组包含的所有token,理想状态下是,即完全的负载均衡,因此只要保证
,k为常数因子,为原损失,为辅助损失,其中E为专家数,表示某个专家分配到的token数(一般被token选定为first_expert,即最大概率专家的token的个数),S是当前专家组包含的所有token,理想状态下是,即完全的负载均衡,因此只要保证![]() 即可。而由于μ是一个常数,因此可以直接去掉,而因为是argmax操作,不可导,因此又引入me表示平均门限分数,即某个专家接收到的token的概率的平均值,这里的概率指当前token选择该专家的概率。
即可。而由于μ是一个常数,因此可以直接去掉,而因为是argmax操作,不可导,因此又引入me表示平均门限分数,即某个专家接收到的token的概率的平均值,这里的概率指当前token选择该专家的概率。![]()
**4.随机路由选择:**MOE最终输出为选中专家(topk,deepseek-v3给的代码中是6)的加权平均数,在GSshard论文中说的是tok为2时,次优专家以其权重决定是否分配给第二个专家(比如权重比较小,可以选择不分配),分配则该token分配了两个专家,否则只分配了一个专家。
这里Deepspeed做了不同的处理,首先1st expert是一定发出去的,而当选择2nd expert的时候,做了一些加噪的处理,即对输出的每个专家的logit,从某种分布中采样4个噪声,加上之后,mask掉第一个expert的logit,然后从剩下3个中找到最大的作为2nd Expert。
4.伪代码
"""
1. 通过gate,计算每个token去到每个expert的概率
【input】 :Attention输出的所有token,尺寸为(seq_len,batch_size,M)。其中M表示token_embedding
【reshaped_input】:主要是把token融合到一个维度,即变成(S,M)
【Wg】: 表示gate的权重,尺寸为(M,E),E表示专家的总数
【gates】:表示门控网络的输出,尺寸为【S,E】即每个token到不同expert的概率
"""
M = input.shape[-1]
reshape_input = input.reshape(-1,M)
gates = softmax(einsum("SM,ME -> SE"),reshape_input,Wg)#可以看到门控网络计算后要做一个softmax把logit转化成概率
"""
2. 确定每个token最终要去的top2Expert,并返回对应的weight和mask
【combine_weights】:尺寸为(S,E,C),其中C表示专家可以接收的token的个数,这个矩阵表示每个token,对每个专家E的权重,而这个权重存放在buffer中的某个位置,如果不是目标位置就用0填充,比如对于图中的token0来说,它的combine_weights的子矩阵,即combine_weights[0,:,:]为:
[ [p0,0,0,0],
[p1,0,0,0],
[0,0,0,0],
[0,0,0,0], ]
注意:combine_weights与gates算出来的权重不同,因为会对选中的top2个token再做一个归一化,并且可能是先random,选中的不一定是gates中次大的token。
【dispatch_mask】:尺寸为(S,E,C),它相当于把combine_weights有数值的位置改为True,而为0的位置则都为false,用来记录每个token在每个专家的每个buffer区域是否放置了这个token。
"""
combine_weights,dispatch_mask = Tok2Gating(gates)
"""
3. 将token数据放置到对应的buffer区域
【dispatched_expert_input】:尺寸为(E,C,M),我们在第二步拿到了dispatch_mask,dispatch_mask记录了每个token 应该放置在每个专家的buffer区的什么位置,因为放了就为1,没放就为0,因此我们根据dispatch_mask来放置reshaped_input中的每个token,就得到了expert的输入,即每个专家的每个缓冲区的token_embedding数据,如果此时缓冲区没有放满,就用zero向量填充。
"""
dispatched_expert_input = einsum("SEC,SM->ECM",dispatch_mask,reshape_input)
"""
4. 进行expert计算
expert也和FFN一样,由两个线性层,Wi和Wo组成
【Wi】:尺寸为(E,M,H)
【Wo】: 尺寸为(E,H,M)
【expert_outputs】为expert的输出,大小为(ECM),和输入的大小一样,即仅做线性变换
"""
h=einsum("ECM,EMH->ECH",dispatched_expert_input,Wi)
h=relu(h)
expert_outputs=einsum("ECH,EHM->ECM",h,Wo)
"""
5. MOE的输出:加权求和
利用第二步得到的combine_weights,可以找到,每个token对于每个专家的概率,放置在每个buffer中。拿出这些概率和每个专家对应buffer上的token数据进行加权求和,得到最终结果。
"""
output=einsum("SEC,ECM->SM",combine_weights,expert_outputs)
output_reshape=output.reshape(input.shape)
einsum在这里泛指我们自定义的某几种矩阵计算方式,它使得我们在计算矩阵计算的同时,能够维持token和expert的顺序
5.MOE混合并行训练
首先明确一点,在表示MOE的混合并行训练方式中,例如EP+DP,EP+TP+DP等等,都特质对MOE层的并行方式,而跟非MOE层没有任何关系,一般可能会采用MOE_GROUP来指定混合并行的方式。
TP2DP4+EP4(DP2)
.drawio-86bb3c3c80cbb8a3fa9d0b942ff08a25.png)
如图为一个混合并行的示例,这里专门为了区分MOE层和非MOE层,使其使用不同的并行策略,非MOE层做TP2,DP4,而MOE层做EP4DP2,首先数据大小batch_size=8,被分成4份到4个TP组上,每个TP组再做2路tp,将非MOE层进行切分,而对于MOE层来说,做4路EP,即ep_group_size=4,将专家分到4组ep_dp_group上,ep_dp_group内部再做2路dp。
在一些框架中如(megatron),为了复用已有的并行方式,少做修改,一般会强硬限制,若non-MOE做了tp切分,则MOE也必须做同样的tp切分,在此基础上再去安排MOE的ep等并行。
6.Deepspeed对ALL2ALL通信的改进
基本的ALL2ALL
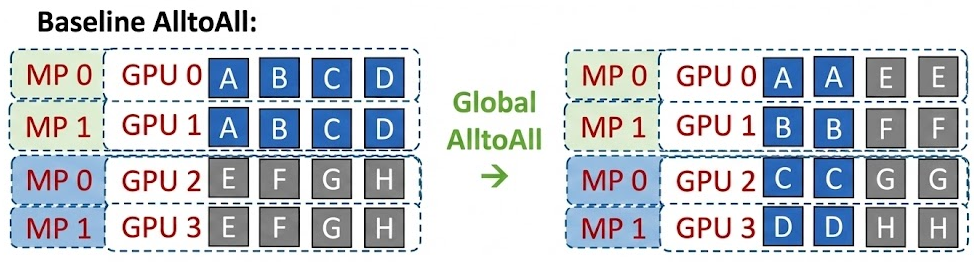
其中MP表示的就是TP,图中相关的分布式group为: TP_group[[0,1],[2,3]]
Ep_group[0,1,2,3],即四张卡分别存不同的专家
这里描绘了ep_group首次做all2all的过程,将token发送到对应的expert上,看起来就像是做了一次矩阵转置操作,这里就体现了按照要去的专家位置排好顺序的意义,但是会发现同一个tp组因为做了allreduce,数据是一样的,那在all2all的过程中会被重复发送和计算,怎么减少重复呢?
理论的改进版All2all
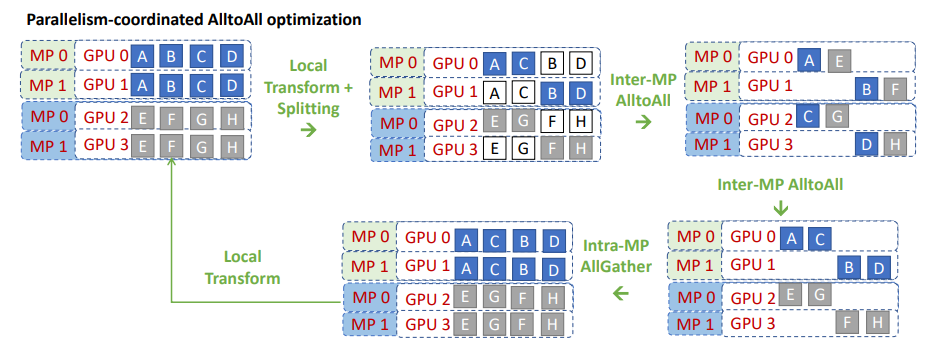
deepspeed改进版all2all的核心是:既然同一个tp组内的数据重复,那就在tp组内数据进行切分,每个tp组内的每块卡维护不同的数据,但是all2all group内一共有4张卡,如果要正常做all2all,卡上的数据和卡数应该相同。
因此更进一步的想法就是把all2all group也做切分,如图先做Local Transform之后,改变数据的排序,其实这里改变的是发送到专家的顺序,0卡只需要和2卡交换数据,1卡只需要和3卡交换数据,因此这里操作就是将每个tp组内,同一个rank号的tp构建为一组新的all_to_all通信组,这样就可以只用创建两个通信组,而同一tp组内的做数据的split,让每个tp上要发送和接收的数据都不一样,然后两两做all_to_all通信,经过MOE层处理后,再做一个all_to_all通信恢复,最后每个tp组内用一个allgather获得全量的数据。
deepspeed代码的实际操作All2All的方法
由于上述方法,将all2all的通信组直接改了,实际上适配会改动很多代码,因此实际操作时deepspeed并没有按上述方法做,而是用了一个叫**"drop_tokens"**的方法,因为每张卡的输出数据维度是(E,C,M),之前的切分之所以不行,其实是因为切分是在专家维度上切分,all2all通信也是专家维度,因此就导致要切all2all的groups,而可以发现,我们其实可以对每个tp组内,沿着C维度去切分数据,相当于一个tp组内,每个tp还是要处理发送和接收给所有专家token,但是每个tp只处理一部分的expert buffer中的要发送和接收的token,并且每个tp处理的数据都不一样。最后再通过一个all-gather操作,得到完整数据即可。
改进版的All2All(实际操作)注意事项
假设,MOE也做了tp的切分,这时候变成tp2ep2,即原来非MOE的tp组内加上了对epxert参数的切分,那么gpu0和gpu1此时分别包含epxert1的一半参数,这时候就不能用**"drop_tokens"**,因为虽然给到gpu0和gpu1的token是同一个,但是expert参数现在是partial状态 ,计算完后,要做allreduce才是最终的结果,所以此时gpu0和gpu1上的数据重复是有意义且必须的,因此就不能做drop_tokens了。
7.PR-MOE(Pyramid-Residual MoE DeepSpeed提出)
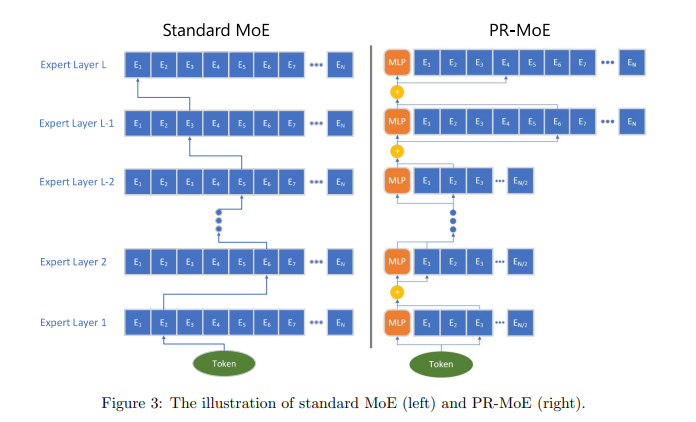
DeepSpeed还提出了一种自定义的PR-MOE,首先会让后面的层的专家数比前面的层的专家数多出一倍,所以看起来像是一个倒着的金字塔,也就是Pyramid,其次,DeepSpeed因为固定topKgate中的k为1或2,因此在PR-MoE中,当k为2时,top1的expert会被固定,即用一个固定的MLP代替可选的expert,仅仅对top2的expert进行选择,前者用来兜底,后者用来校准。相关代码如下:
output = self.deepspeed_moe(hidden_states, used_token)
if self.use_residual:
# Residual MoE
output_mlp = self.mlp(hidden_states)
if type(output_mlp) is tuple:
output_mlp = output_mlp[0] # Ignore the bias term for now
coef = self.coefficient(hidden_states)
coef = torch.nn.functional.softmax(coef, dim=-1)
output = output * coef[..., 0:1] + output_mlp * coef[..., 1:]
return output, self.deepspeed_moe.l_aux, self.deepspeed_moe.exp_counts
其中,coefficient是一个Linear层,输出大小为(hidden_size,2),2即表示一份expert的权重,一份固定的mlp的权重。可能的一种训练后的理想效果是:当输入问题偏向专业领域,则给expert的权重更高一些;当输入问题偏向于通用领域时,则给固定的mlp的权重更高一些。
8.Megatron的SwitchMLP
与DeepSpeed不同的是,Megatron在做MOE时(默认使用TOP-1 expert),非MOE层和MOE层的TP_group是统一的,并且Megatron并不采用All-to-All进行通信,而是使用allgather+reducescatter,并且是drop_less的,也就是top-1 expert(这里只讨论默认情况)一定会发往它经过gate计算后概率最大的那个专家,所以它是如何保证通信的负载均衡的呢?
首先,在DeepSpeed中,会根据gate去计算每个token应该发往哪个设备上的expert,而由于可能存在,多个token都发往同一个expert,因此会早成all-to-all通信时的负载不均衡,因此,DeepSpeed中提出了一个capacity,用来限制expert可容纳的token容量,超出的就drop掉,没填满的就用zero padding填充。这样每个rank发送的通信量都限制在capacity,从而达到负载均衡。
而现在Megatron如果一定将token发往既定的expert,此时我们可能会想到出现复杂不均衡,然而,Megatron是用allgather,即每个ep_rank都直接拿到所有的数据(从这也可以看出通信量会增加),然后再去看哪些数据是属于当前rank上的expert需要处理的,把非当前rank上的expert需要处理的数据给mask掉(这里计算出来就是0),每个expert计算完成后,即使在TP下,也不做allreduce,而是用reducescatter,一方面把之前allgather过来的数据块,再按块返回给每个rank,另一方面将不同rank上的同一块数据做reduce,得到全局数据。
9.问题记录
1.输入到MOE-layer的输入,我们记输入数据的尺寸为(S,M),S是,为什么此时可以直接分裂一条语句的所有token,并且可以把多条语句的token融合计算?
因为对于FFN来说,在计算时,是不需要计算token之间的相对关系的,因此为了提升计算效率,通常都是将整个Batch里所有的句子的所有token混合在一起,并通过分布式处理来加速和降低显存。当经过FFN处理后,又会把所有token打包回来,恢复到之前的位置,即恢复成(batch_size,seq_len,hidden_dim)的形状,再输入给Multi-Attention层去处理。
2.Gshard中top2Expert如果选择的两个Expert都已经放满了,即溢流了,会怎么处理这些token?
**Drop tokens:**若单个token溢流,则只算另一个token,若两个都溢流,这个token直接通过残差连接的方式直接给到下一层,不做处理。会发现如果drop的token太多,会导致丢失太多信息,因为这些token都没有被expert处理,因此这也是后续优化的点。
3.Auxiliary Loss为什么引入me?
因为是不可导的,的定义是某个专家buffer中已经存放下的token数(一般主要关注的是被token作为1st专家选中的那些token),而这个是一个argmax的操作,即调整某个Router对某个token的输出,即token发往各个专家的概率:
所以它无法正常做求导,但是如果引入(该专家 buffer 中 token 的 avg(weight)),也就是所有token概率总和除以当前的token数,而这个值,会随着每个token选择该专家的概率值的改变而动态变化,并且变化是一个平滑连续的,此时相当于直接看成一个常数权重,如下:

从而让该Loss可导。
4.为什么每个expert的输入维度是(E,C,M)
首先为了保证每个expert都接收C大小的矩阵,如果有的expert buffer没有被填充满,则会用zero padding。
这里其实指的是单卡视角,因为每个专家能接受的token数量的能力是C,而每个token的隐藏状态的维度是M,又有一个专家,则如果在单卡上,可以直接把输入拼在一起,并且将专家参数拼起来,并且使用Batch Matrix Multiplication (BMM)计算,BMM计算的方式如下:

所以其实是利用GPU并行计算每个专家的输出。
如果是多卡分布式,那么每张卡只会计算(1,C,M)的数据。
5.Megatron和Deepspeed在做ep_group的通讯时的不同处理
deepspeed使用all2all通信,每个token是定向发送到它所对应的卡上,所以通信时会存在有的卡接收发送的token多,有的少。
megatron则使用的allgather通信,它不管token对应的expert是哪个,而是直接把数据全量发到每一个ep卡上,然后mask掉不是这张卡的expert维护的token,这样在通信时,ep_group时负载均衡的,缺点是发送大量的重复数据。