Flash_attention
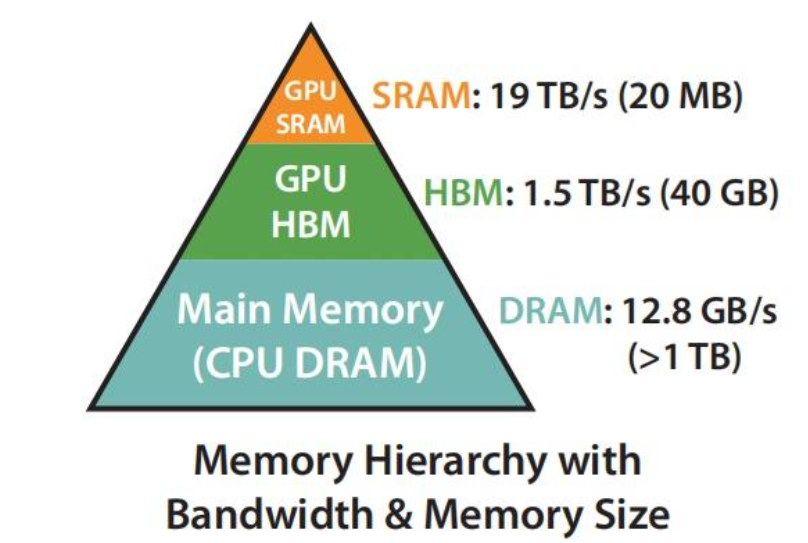
首先明确一点,FlashAttention的提出,是为了解决在计算attention矩阵时,计算较慢的问题,因为一般会把整个大矩阵加载到HBM(High Bandwidth Memory)—高带宽内存;而现在希望将其加载到SRAM(Static Random-Access Memory)—静态随机访问存储器,如下图所示,展现了其计算速度。而由于SRAM存储容量较小,但计算Attention时的显存较高,一般需要的显存为O(N*N),Q,K,V∈R^N✖d^,因此,提出了FlashAttention,将Q,K,V矩阵分块,逐块加载到GPU的SRAM中计算,并且提出了在backward过程中,利用forward过程计算得到的softmax的归一化因子,在SRAM中快速重计算注意力矩阵,而不是一致保留forward过程的中间结果,而导致显存被持续较大占用,同时将注意力操作融合到一个GPU kernel中,避免从HBM多次读取和写入;最后进一步将其扩展为稀疏版,仅计算非零块的注意力矩阵,进一步降低内存访问次数和计算复杂度。
1 safe_softmax
attention的计算公式如下:
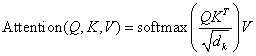
首先这里需要明确,Q*K^^T^,是为了计算每个token和其它token的注意力(可以看作是token之间的相关性),并且S=Q*K^^T^/根号(d~k~)这里的softmax是针对S的每一行分别做softmax,即S经过softmax后的矩阵n*n的每一行的和为1。而这里除以根号(d~k~)是
Softmax 函数是机器学习和深度学习中广泛使用的归一化指数函数,主要用于将任意实数向量转换为概率分布,其计算公式如下:
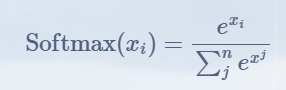
在计算 Softmax 时,即使数据类型为 FP32,当 时,分子 已经超过了 FP32 的范围。Safe Softmax 通过减去中的最大值,来避免数据溢出,其公式如下: $$ \text{Safe-Softmax}(x_i)=\frac{e^{x_i-m}}{\sum_j^ne^{x_j-m}},m=\max(x_1,x_2,\ldots,x_n) $$ 因为 ,x~i~-m<0所以避免了分子数据溢出。
2 online_softmax
onlinesoftmax的提出,主要用于服务flash_attention,因为flash_attention将WQ,WK,WV,WO进行了分块,而在计算softmax的时候,是整个self_attention矩阵的每一行,计算一个softmax,所以一般来说需要获得这一行全部的数据,才能计算出,这一行每一个token的softmax,因此在计算时,需要流式计算。同时从本质上来说,计算safe softmax的时候,要首先遍历一遍,得到最大值m,再遍历一遍得到分母,即所有x~j~-m的总和,最后遍历一遍,计算每个softmax(xi);而使用online_softmax,计算如下: $$ m_i=\max(m{i-1},x_i) $$
$$ d{i-1}=e^{x{1}-m{i-1}}+...+e^{x{i-2}-m{i-1}}+e^{x{i-1}-m_{i-1}} $$
$$ di=d{i-1}\cdot e^{m_{i-1}-m_i}+e^{x_i-m_i} $$
每次输入进来新的xi时,此时新的mi,即为之前的最大值mi-1和当前的xi中的最大值。
而di则等于,把所有的求和项的,m~i-1~换成m~i~,并且加上最新的第i项,即如上式所推导。
3 FlashAttention
沿着序列维度,即seq_lenth进行切块
主要在训练时,可以并行计算token的attetion时使用
算法流程图如下:
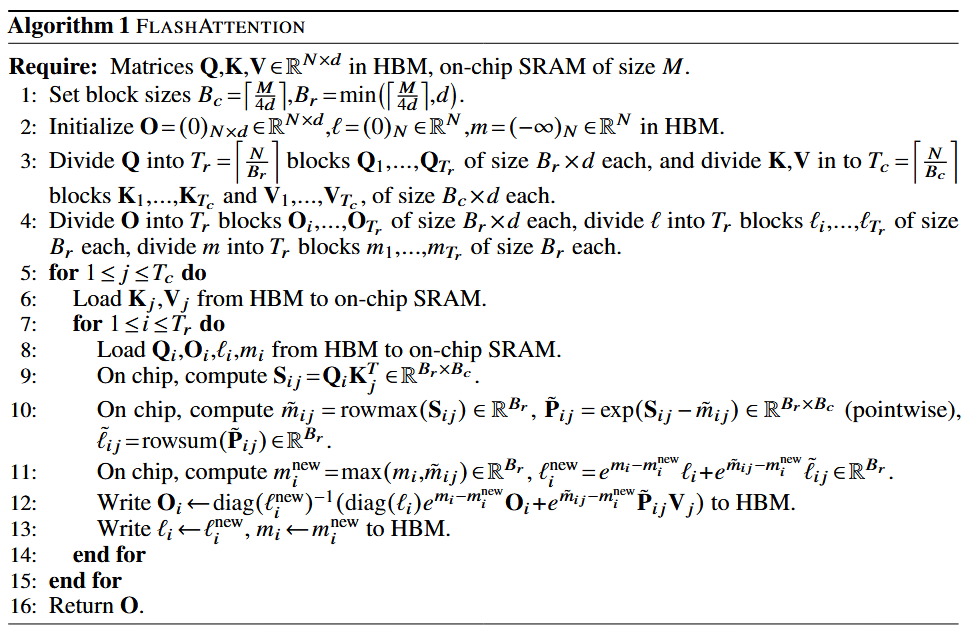
算法公式解读:
Step 1.首先Q,K,V∈R^N×D^保存在HBM上。
设置 $$ B~c~ = \lceil \frac{M}{4d} \rceil $$,这里B~c~是K,V分块的大小,按行切分,M是SRAM的大小,除以4d是因为要同时存放Q,K,V,O四个矩阵的数据。
设置$$ B~r~ = min(\lceil \frac{M}{4d} \rceil,d) $$,B~r~是Q分块大小,按行切分。注意M被分成了Bc*4d,即假设Q,K,V,O都是Bc*d的大小,但是注意我们还要保存中间计算变量,而中间计算变量最大的就是S∈R^Br×Bc^,假设Bc大于d,则取d,目的是让S的大小不超过Bc*d,从而可以用Q∈R^Br×d^则能放下S,否则Br*Bc>Br*d,Q就放不下这临时变量了,用Q放是因为,内循环是Q块,Q此次计算后,在内循环就用不上了。
Step 2.预留结果暂存空间Q,K,V∈R^N×D^保存在HBM上。
O是最后的输出,l是最终对于N行,每轮计算后,每一行的sum(P~ij~),m是N行每轮计算后,每一行的最大值S~ij~。P~ij~即e^S~ij~-m~ij~^。所以l其实就是softmax的分母,只不过因为分块原因,这个分母总是一个临时的,直到最后一次计算。
Step3.将矩阵分块
T~r~是Q的分块数,T~C~即K,V的分块数。
Step4.双重循环逐步计算O~i~*(过程中更新softmax)
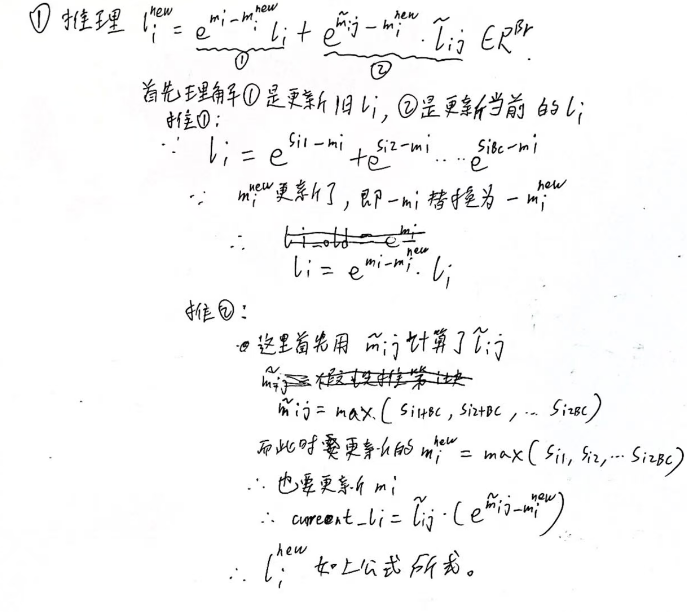
外循环为K,V,Load一个K,V块从HBM到SRAM,循环Load每一个Q~i~,O~i~,l~i~,m~i~,每次计算出一个S~ij~,注意因为Q~i~是按行分块,所以每一次内循环,其实是为每一行算出一个S注意力矩阵,这个S在这一次内循环中是相互不影响,且不会存在m~ij~,l~ij~的多次更新的,而是每一轮新的K~j~,V~j~和Q~i~计算时,要对前一次的m~ij~,l~ij~进行更新,同时新的m~i~很好理解,就是取第i行,当前块$$ \hat{m}_{ij} $$和前面块m~i~的最大值,而l^new^~i~的计算,之所以是这样的,前半部分其实是更新原来的l~i~中减去的最大值m~i~,而后面部分其实是因为,前面已经把当前第i行的l~ij~算出来,所以,这里再把对应的m~i~也更新一下即可。两个加起来就是最新的l~i~。因为l~i~和m~i~更新了,因此这里还要更新之前计算的O~i~,并计算此时的O~i~,然后二者是累加的关系,从而得到最新的O~i~。
手推li和Oi更新的公式如下:
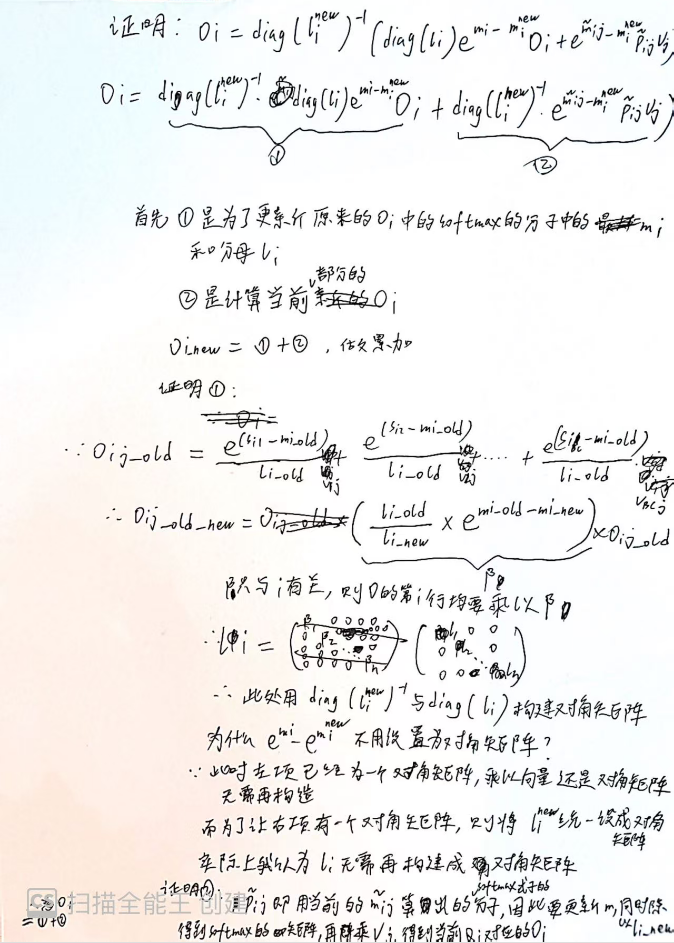
这里最重要的一点是,在此处更新O~i~的时候需要构造对角矩阵(这里也暗示了flashattention的一个缺点,由于对角矩阵的存在引入了额外的计算开销)。
为什么构建对角矩阵,上面的手推公式已经证明,上面公式有个错误应该是e^mi-mi_new^也需要构建对角矩阵,否则维度不匹配。
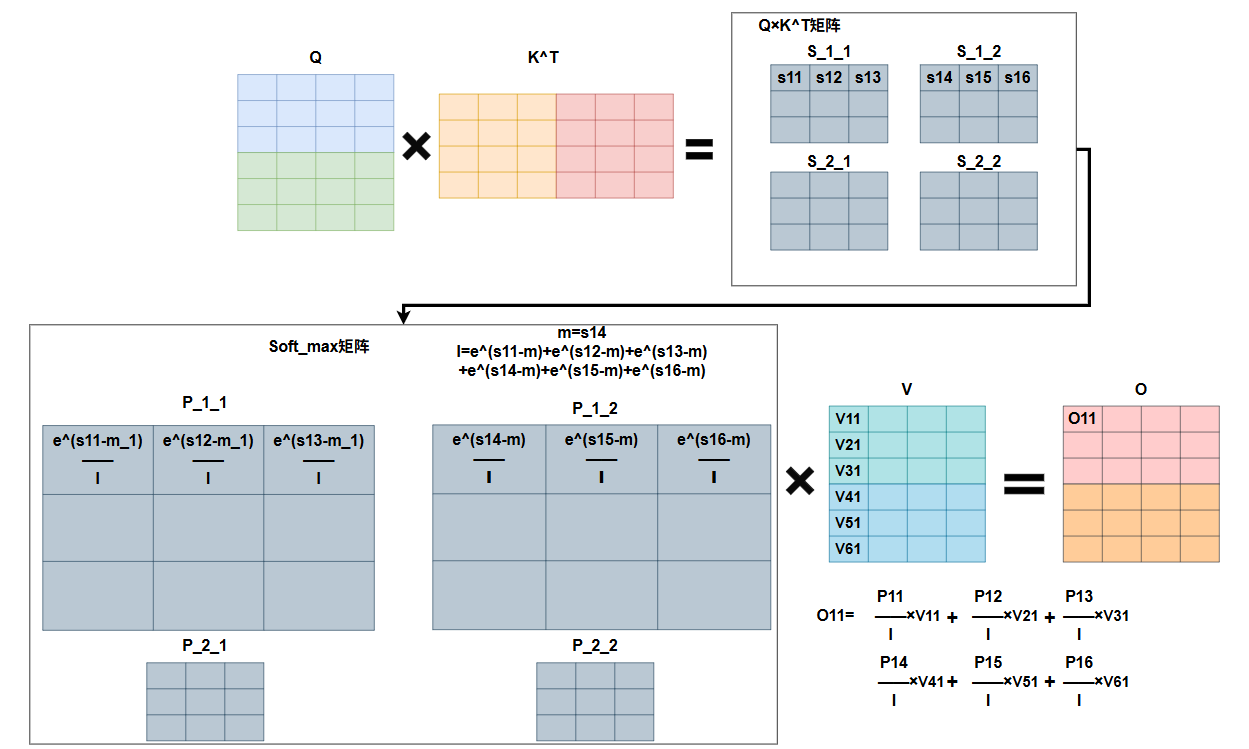
如下是整个flash_attention的计算过程的图形示意:
普通attention计算(为了和FlashAttention对齐,做了矩阵拆分,实际运算时,整张矩阵做运算):
Flashattention计算:
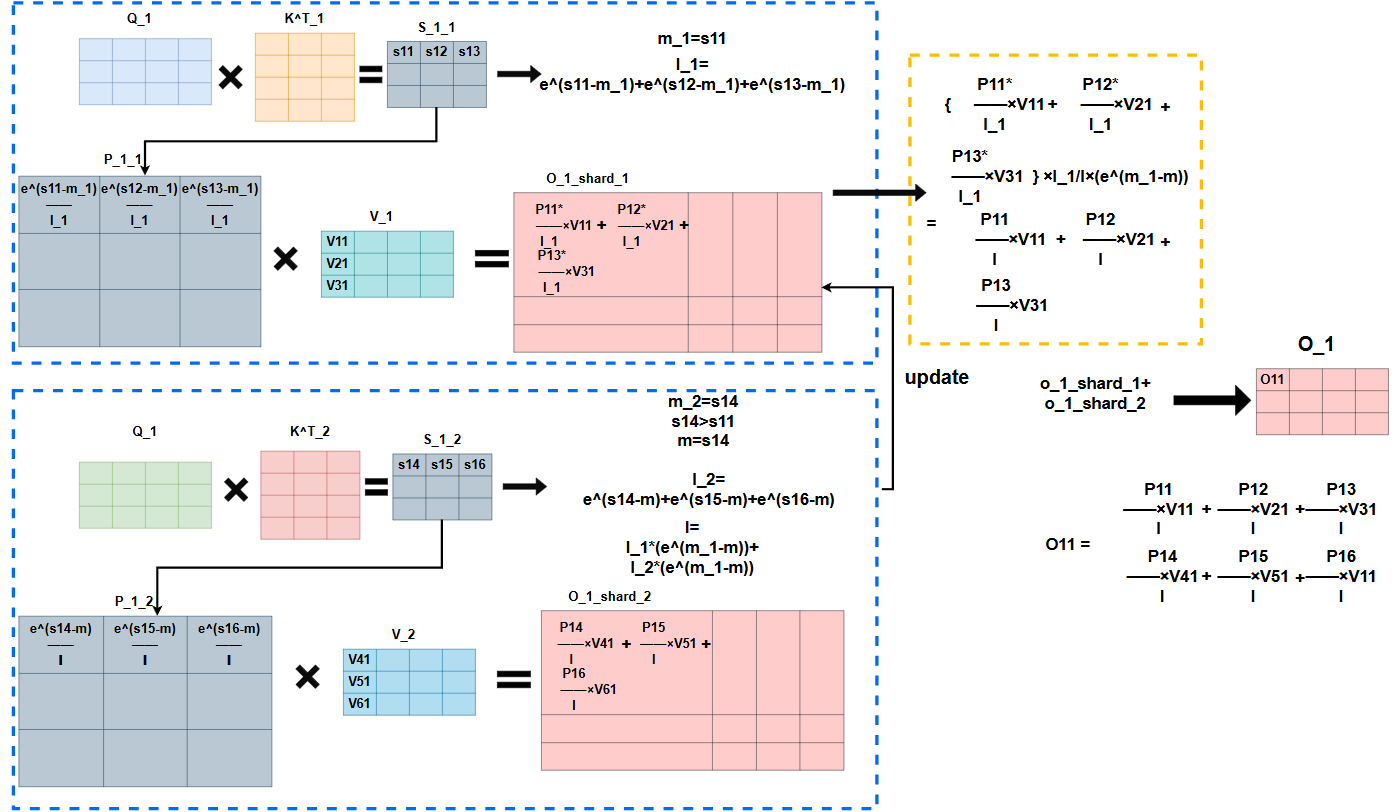
可以看到采用ring_attention的思想,Q_1会在两次外循环后,分别和全部的K矩阵相乘,而最后一次计算完成后,才能完全确认第i行最大的m,从而确认l。算法当中每次是先用当前第i行的最大值作为mi,去计算li,但其实可以直接将当前这一行的最大值和m_max_old作比较,得到截止到目前这个块,第i行的最大值,从而确认l,否则还会重复计算,因此这里我认为可以优化一下。
而由于Q_1经过第一次外循环计算出来的O_1均是基于m_1与l_1的,而softmax是需要用全局的m与l的,因此这时候要重新计算O_1,即*l_1/l,这一步是将分母替换成l,而分子中的Pij中的每一项,同样是用的Sij-m_1,要替换成-m,因此*e\^(m_1-m)做替换。又由于,对于整个O_i来说,这里替换的其实是li和mi,都是∈R^Br^,即一维向量,而对于O_i的每一行,都要乘以li向量对应的每一个值,所以将li转换为对角矩阵,即用li向量的每个值构建对角线,其它均为0,即可实现,这里我认为e^mi-mi_new^也需要构建对角矩阵,公式中应该是笔误,否则维度不匹配。
3.1 FlashAttention存在的一些问题
1.FlashAttention在反向时会重计算,用时间换空间
2.由于对角矩阵的存在,会引入额外的计算开销,造成资源浪费
3.2 FlashAttention正向代码手撕
import torch
import math
# 论文中 QKV 的形状为(N,d),对应到这里为(seq_len,head_dim),假设Q的形状为(batch_size,seq_len,head_dim)
def falsh_attention(query,key,value,mask=None)
#负无穷大
neg_inf = float('-inf')
# epsilon 防止除0
epsilon = 1e-6
#N,d
seq_len = query.size(-2)
head_dim = query.size(-1)
# 预留 output
output = torch.zeros.like(query,device=query.device,dtype=torch.float16)
# 记录分块 softmax 中的最大值 ,去掉query的最后一个维度,则m的大小为[batch_size,seq_len),再增加一个大小为1的维度,因为m是取head_dim维度里面的最大值,所以用unsqueeze,最后乘以neg_inf,初始化,最大值都是负无穷大
m = torch.ones(query.shape[:-1],device=query.device,dtype=torch.float16).unsqueeze(-1)*neg_inf
# 记录分块 softmax 的和
l = torch.zeros(query.shape[:-1],device=query.device,dtype=torch.float16).unsqueeze(-1)
# KV 的行分块大小,由M决定,M为SRAM的大小,向上取整,分更多的块
B_c=math.ceil(M/4*head_dim)
# Q的行分块
B_r=min(B_c,head_dim)
# KV的分块数
T_c = math.ceil(seq_len/B_c)
T_r = math.ceil(seq_len/B_r)
#Q,K,V分块
query_blocks = torch.split(query,B_r,dim=-2)
key_blocks = torch.split(key,B_c,dim=-2)
value_blocks = torch.split(value,B_c,dim=-2)
#Mask分块,mask/mask_block维度为N*N/Br*Bc,与S维度相同,沿着最后一个维度切,即列切,所以是B_c,即沿着head_dim,因为每次算出来Si都是第i行的部分列的数据。
mask_block = torch.split(mask,B_c,dim=-1)
# output、m、l分块;元组不支持按索引修改,而列表支持,后续要更新output、m、l
output=list(torch.split(output,B_r,dim=-2))
m_block=list(torch.split(m,B_r,dim=-2))
l_block=list(torch.split(l,B_r,dim=-2))
#分块计算注意力
for j in range(T_c):
key_j=key_blocks[j]
value_j=key_blocks[j]
mask_j=mask_block[j]
for i in range(T_r):
query_i=query_blocks[i]
output_i=output[i]
m_i=m[i]
l_i=l[i]
#计算S
S_ij=torch.matmul(query_i,key_j.transpose(-2,-1))/(head_dim**0.5)
#mask
if mask_j is not None:
S_ij=S_ij.masked_fill(mask_j.unsqueeze(1)==0,float('-inf'))#应该是扩展成(batch_size,head_num,seq_len,head_dim),若某个维度不匹配,则广播数据,即复制此维度的子维度,这里设置负无穷是因为经过soft_max后会趋近于0
m_ij=torch.max(S_ij,dim=-1,keepdim=True)
#这里先用局部最大值算,而不是全局最大值,主要是较小的m可以保证数值较为稳定,同时使得Pij计算出来的数值精度较高,而保证lij计算出来的数值精度较高
P_ij=torch.exp(S_ij-m_ij)
l_ij=torch.sum(P_ij,dim=-1,keepdim=True)+epsilon
m_i_new=torch.max(m_ij,m_i)
#逐元素相乘,因此用*,都是[Br,1]的形状
l_i_new=torch.exp(m_i-m_i_new)*l_i+torch.exp(m_ij-m_i_new)*l_ij
#计算并更新output,l_i和torch.exp(m_i-m_i_new)都是Br*1,在与output_i做乘法时会进行广播,从而扩展到Br*d,再逐元素相乘
output[i]=(l_i*torch.exp(m_i-m_i_new)*output_i+torch.exp(m_ij-m_i_new)*torch.matmul(P_ij,value_j))/l_i_new
m[i]=m_i_new
l[i]=l_i_new
#拼接结果
output=torch.cat(output,dim=-2)
return output